-
第九届信息科学、计算机技术与交通运输 71

-
2024年第三届通信,信息系统与数据 06-14

-
2024年第二届设计科学国际学术会议 06-14
-
2024创新设计、数字技术与新媒体发 06-14
-
2024清洁能源、低碳技术与环境工程 06-14
-
2024精密仪器与光学技术国际会议( 06-14
-
2024人文教育、心理健康与社会发展 06-14
-
2024文化产业、旅游管理与经济发展 06-14
-
关y于召开2024年土壤与地下水风险 06-14
-
2024年电力系统、能源工程与控制科 06-14
-
2024年管理创新、公共服务与可持续 06-14
-
2024年文学、公共文化与社会服务国 06-14
-
2024年多媒体、艺术设计与数字化技 06-13
-
2024年生物医药与生物信息学国际会 06-13
-
2024年语言、公共艺术与文化交流国 06-13

















-
10类常见的材料科学SCI期刊 188
-
一些优秀的微观经济学论文题目的举 73
-
了解黄金级别的科学技术论文摘要的 35
-
学术论文文章应该具备哪些特征 42
-
关于机械工程与自动化论文摘要的写 18
-
介绍与海洋资源开发技术相关的中文 96
-
《武汉冶金管理干部学院学报》是武 75
-
哪些人群可以参加学术会议? 91
-
出版英文专著前需要做的重要事情 97
-
匿名审稿伦理问题的分析和探讨 12
-
十大计算机sci水刊 53
-
毕业论文时间上的一般准备与安排 57
-
介绍农产品质量与安全论文摘要写作 13
-
科研人员如何克服数据收集困难 13
-
代写代发表论文可靠吗? 55







-
医建科技(杭州)有限公司 23432

-
国际电子信息技术学会 22445
-
广州助力人力租赁有限公司 17422
-
南京财经大学 22407
-
科促会 22416
-
对外经济贸易大学 1424
-
鄂尔多斯九盟集团 17476
-
山东大学文学与新闻传播学院 23427
-
西藏昌都国际旅行社 拉萨旭 20397
-
上海市上海大学 22444
-
海军工程大学 20409
-
中国中药协会;北京康派特 22394
-
西安华线石油科技有限公司 7403
-
Higher Education 23404
-
机械工业自动化学会 20411
-
武汉奔诚文化传播有限公司 7426
-
中山大学南校区 17432
-
HKSME 23405
-
上海华宏MBA培训中心 17411
-
中国医药教育协会 1448












清华大学 深圳国际研究生院张旻团队在微型柔性机器人越障和无缆自主化运动领域取得新进展
2024/04/15
 60
60与大型机器人相比,昆虫级别的机器人具有独特的优势。凭借着微小的尺寸,机器人可以轻松地探索许多大型机器人无法进入的地形环境,诸如废墟、缝隙、管道等,甚至可以进入狭小密闭的空间,执行一些精细化任务。昆虫尺寸的柔性机器人具有体积小、环境适应能力强、可集群化工作的特点,在面对自然界中非结构化的复杂地形时,如何在柔性执行器驱动力弱、功率密度低、柔性机构传动精度差的限制下实现机器人的越障和无缆化敏捷运动,对赋予机器人全地形通过能力和迈向实用化具有重要意义。
近日,清华大学深圳国际研究生院张旻副研究员团队在前期提出的压电谐振驱动微型柔性机器人的基础上,提出了一种无需反馈控制的机械式被动越障方法。机器人采用类环状曲面腿,可实现对小尺寸障碍物地形的顺滑通过和大尺寸障碍物的碰撞式通过。通过前腿曲面部分的迎角设计,提高了大于机器人身高的台阶障碍物的通过能力,并在原有有缆柔性压电机器人的基础上,设计了压电驱动电路系统、负载携带结构和反馈控制单元。研究团队采用静电足垫与圆弧形腿相结合的结构,实现了机器人在携带驱动电路与电源的情况下,仍能保持较高的转向敏捷性。
图1.环状腿柔性机器人照片和主要结构
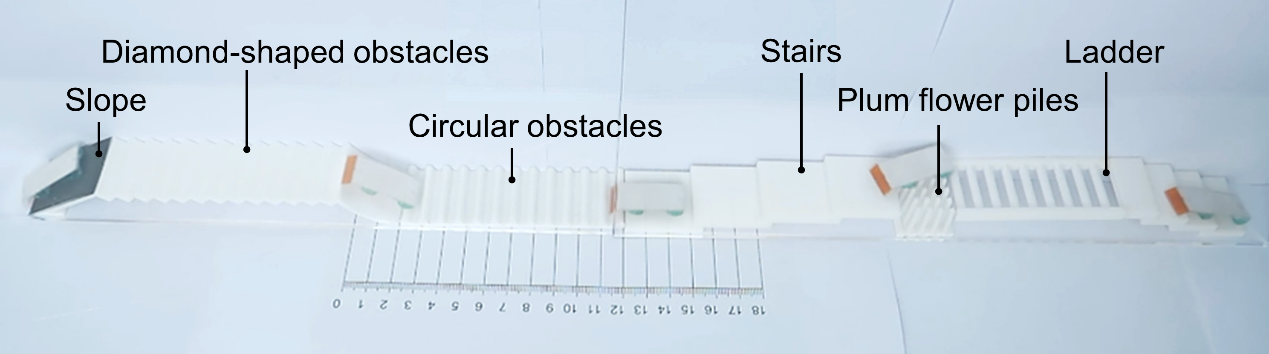
图2.机器人穿越复杂三维地形示意图
微型机器人可集成多种功能模块和精细机械结构实现越障。若采取闭环的精准运动控制,时间迟滞会导致准静态越障;而用机械结构补充开环控制,能在无神经调节的被动力学下快速越障。课题组在昆虫级别柔性机器人有限的身体空间中设计了类环状曲面腿的机械结构(图1),依靠主体形变,机器人的腿-地机械作用产生“弹性步态”穿越三维复杂地形。通过仿真模拟和对比实验,设计出了具有75度固定迎角的前腿前部理论曲线,保证了碰撞台阶过程中阻力不增大、升力不减小。提出了封闭度100%的类环状腿结构,保证顺滑通过小尺寸障碍物地形,并通过非对称的整体结构,提高振动-前进力的转换比率。采用“辐条式”结构,利用全柔性材料制成的半刚性腿部结构,兼顾了形状的稳定性、抗跌落的结构鲁棒性和抗意外扰动的运动适应性。实验表明,环状腿机器人能在0.36倍身高的矩形凸起地形上保持4身长/秒以上的爬行速度;能实现以100%概率通过5毫米(1.2倍身高)台阶、64%概率通过8毫米(1.9倍身高)台阶;还能穿越镂空梯子、梅花桩等地形(图2)。该研究为小型越障机器人的运动开环控制提供了思路,腾挪了感官控制的操作空间,能够为同类型越障机器人提供参考。
受限于柔性执行器驱动力弱、功率密度低、柔性机构传动精度差的问题,现有的微型柔性机器人仍以拖缆驱动为主,机器人的灵活性和活动范围受到限制,在无缆条件下实现快速运动和敏捷的轨迹控制仍是巨大的挑战。课题组在原有有缆柔性压电机器人的基础上,设计了小型化压电驱动电路系统、负载携带结构和反馈控制单元,实现了柔性压电机器人的无缆驱动(图3)。根据柔性机器人的运动特点,提出了用于携带驱动电路系统和电源的悬架式负载结构,可有效减小负载对机器人运动的影响。通过仿真和实验分析了柔性机器人带负载条件下的特征频率和运动模态,以机器人运动性能为目标优化了悬架负载结构,实现了无缆条件下机器人2.5身长/秒的快速直线运动。为实现机器人的灵活轨迹控制,提出了静电足垫与圆弧形腿相结合的转向控制策略,利用转向时的机器人侧倾,实现了机器人载荷在腿部和静电足垫上的重新自分布,自动调节转向过程中不同足垫上的摩擦力,实现了无缆柔性机器人的敏捷转向(图4),转向速度达到18°/s,机器人能够在43.4秒内通过58厘米长的S形通道。通过低功耗设计,机器人在装配有40mAh的锂电池时,能够连续运行58.6米,对应的机器人运输能量成本(Cost of Transport)仅为261,优于已报道的绝大多数柔性无缆机器人。该研究为昆虫尺寸的柔性机器人实现无缆化的敏捷运动和实用化研究提供了解决方案。
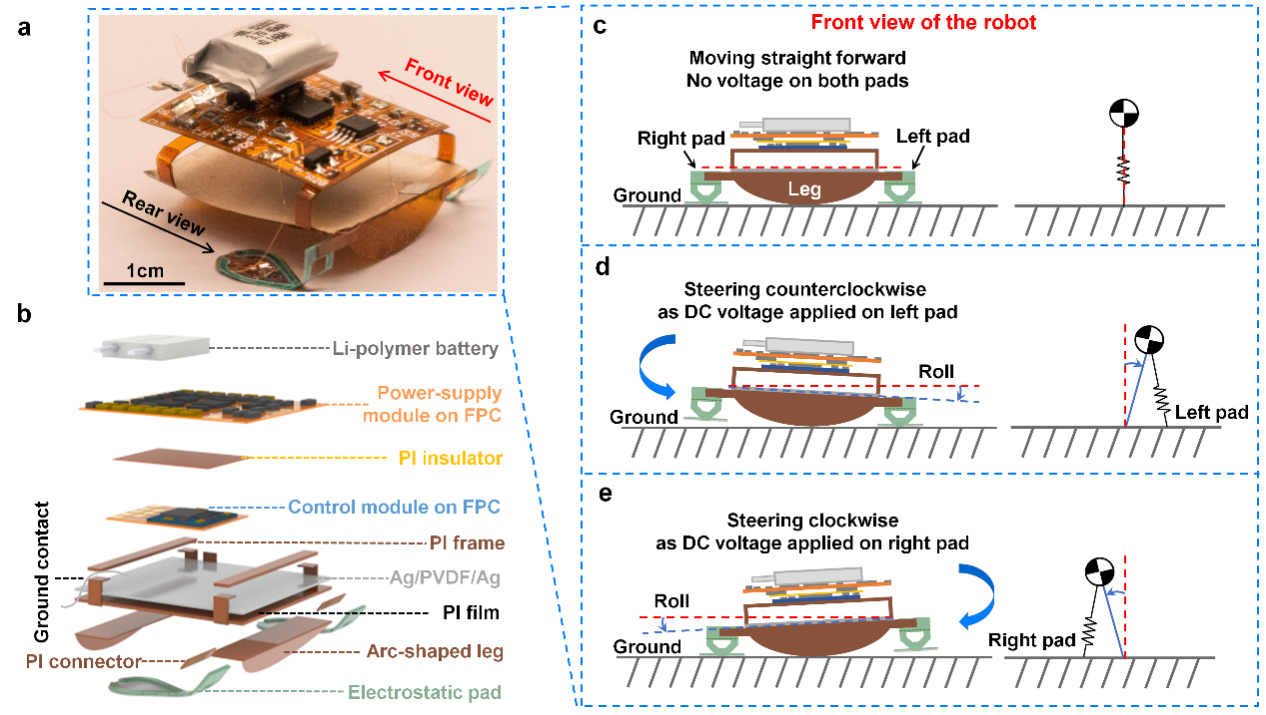
图3.基于摩擦力调控的无缆微型柔性机器人转向原理。(a)可转向无缆柔性机器人原型样机,(b)机器人结构爆炸图,(c)静电足垫工作原理,(d)-(f)机器人直行、逆时针旋转和顺时针旋转时的运动状态
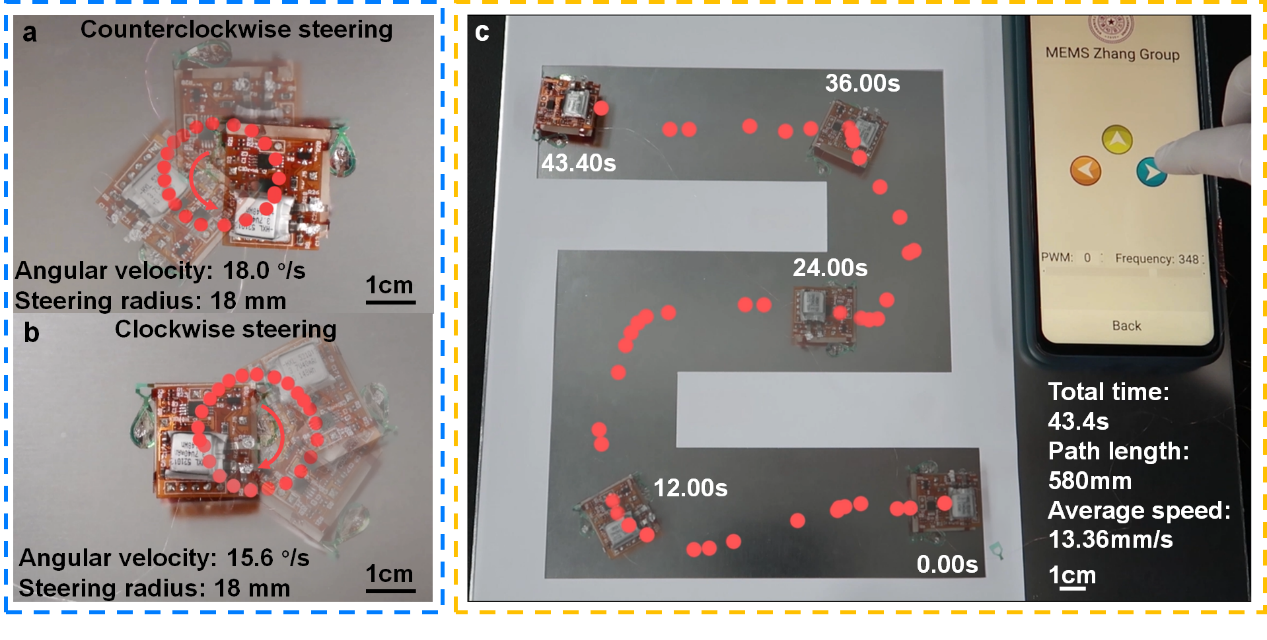
图4.机器人转向运动测试结果。(a)机器人以18°/s逆时针旋转,(b)机器人以15.6°/s,顺时针旋转,(c)机器人通过“S”形轨道
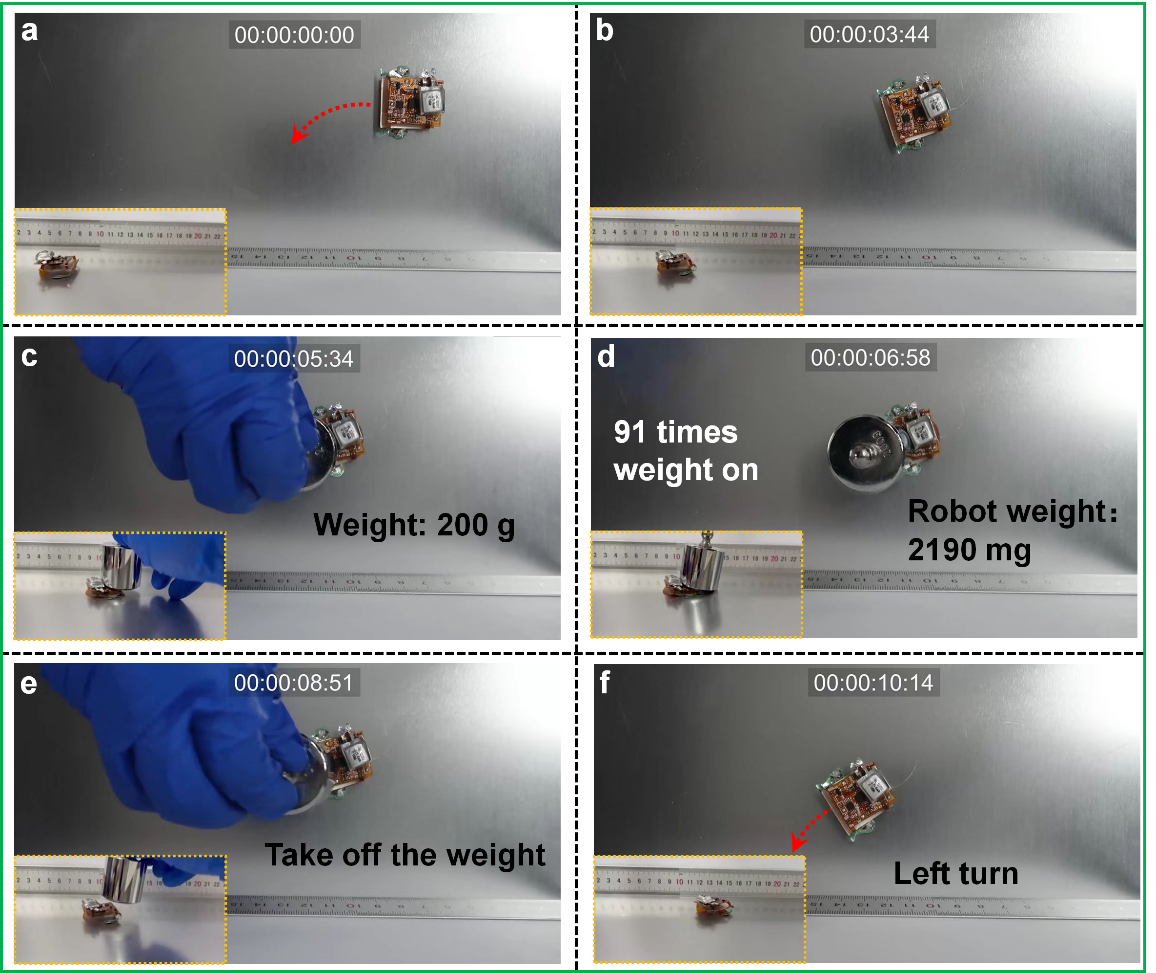
图5.机器人鲁棒性测试,机器人在经受200g砝码挤压时能够快速恢复并保持良好的机动性。(a-f)展示了机器人在被压缩和恢复运动的过程影像
相关成果以“昆虫级别柔性机器人的复杂三维地形穿越”(Complex Three-Dimensional Terrains Traversal of Insect-Scale Soft Robot)为题发表于《柔性机器人》(Soft Robitics)上。论文通讯作者为清华大学深圳国际研究生院张旻副研究员,第一作者为清华大学深圳国际研究生院2019级硕士研究生刘盈,该论文作者还包括清华大学深圳国际研究生院2016级博士生梁家铭。
相关成果还以“无缆自主微型柔性机器人”(Power Autonomy and Agility Control of an Untethered Insect-Scale Soft Robot)为题发表于《柔性机器人》(Soft Robitics)上。论文通讯作者为清华大学深圳国际研究生院张旻副研究员和清华大学精仪系唐飞副研究员,第一作者为清华大学深圳国际研究生院2019级硕士研究生苗子聪,该论文作者还包括清华大学深圳国际研究生院2016级博士生梁家铭。
文章来源清华大学新闻,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。
清华大学物理系徐勇、段文晖研究组将第一性原理人工智能方法拓展至密度泛函微扰理论计算
清华大学 物理系周树云及合作者首次在半导体材料黑磷中实现了脉冲激光诱导的弗洛凯瞬时能带调控
厦门大学杨扬教授课题组在基于分子组装的电子器件研究方面取得进展
清华大学医学院程功团队揭示登革病毒适应性进化促进登革热持续流行的原因
北京大学环境与科学工程学院陆克定团队发文揭示高级醛类自氧化是OH自由基非传统再生机制的关键组成
第十届机械工程、材料和自动化技术国际会议(MMEAT 2024)(2024-06-21)
2024年第二届管理创新与经济发展国际学术会议(MIED 2024)(2024-06-28)
2024年先进机器人,自动化工程与机器学习国际会议(ARAEML 2024)(2024-06-28)
第六届电子工程与信息学国际学术会议(EEI 2024)(2024-06-28)
第五届机械工程、智能制造与机电一体化学术会议暨 2024年汽车新材料新工艺技术论坛(MEIMM2024)(2024-07-05)
2024土木工程、城市规划与交通运输国际会议(ICCEUPT2024)(2024-07-08)
2024年城市建设、智慧交通与通信网络国际会议(UCSTCN 2024)(2024-07-15)
第十届催化国际研讨会 (ICC 2024)(2024-07-19)
2024年亚太计算技术、通信与网络国际会议(CTCNet 2024)(2024-07-26)
2024年新能源、储能与电力电气工程国际会议(NEESPEE 2024)(2024-07-27)
2024科学教育与文化交流国际会议(IACSECE 2024)(2024-6-25)
2024年新媒体发展与数字化管理国际学术会议 (NMDDM 2024)(2024-7-17)
2024年金融、贸易与经济管理国际会议(ICFTEM 2024)(2024-7-23)
2024年应用科学、航天航空与核科学国际学术会议(ICASANS 2024)(2024-7-31)
2024年商业,经济贸易与管理科学国际会议(ICCETMS 2024)(2024-6-25)
2024年第二届计算机技术与信息科学国际学术会议 (CTIS 2024)(2024-6-21)
2024年模型工程、人工智能与基础设施国际会议(ICMEAII 2024)(2024-6-28)
2024智慧金融、当代贸易与经济发展国际会议(ICSFCTED 2024)(2024-7-20)
2024年人文、智慧教育与服务管理国际学术会议(HSESM 2024)(2024-7-21)
2024电力电气与智能电网国际会议(ICEPSG 2024)(2024-6-25)