















清华大学张明君教授研究团队在口服给药微针机器人领域取得进展
2024/03/26
 1112
1112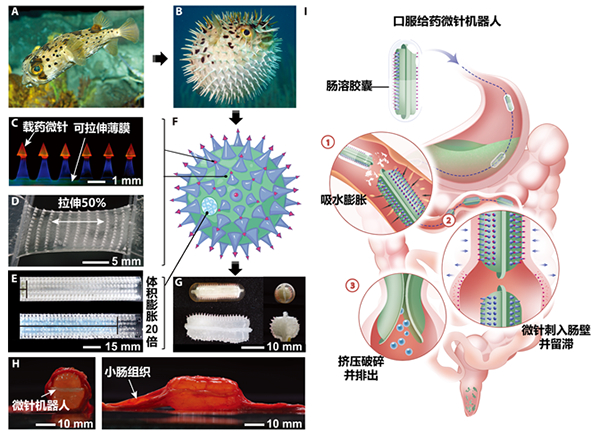 |
图 肠蠕动驱动的仿刺鲀口服给药微针机器人
在国家自然科学基金项目(批准号:62173200、62350710211、62173198)资助下,清华大学张明君教授研究团队与徐静副教授研究团队开展交叉合作,在口服给药微针机器人的“感知-驱动一体化柔顺控制”方面取得进展。研究成果以“利用肠蠕动驱动的微针机器人实现生物药物的无痛口服递送(Pain-free oral delivery of biologic drugs using intestinal peristalsis–actuated microneedle robots)”为题,于2024年1月5日发表于《科学•进展》(Science Advances)期刊上。论文链接:https://www.science.org/doi/10.1126/sciadv.adj7067。
当前,生物大分子类药物在重大疾病的防治中发挥着极其重要的作用。然而,此类药物无法直接被胃肠道吸收,因此研究能够突破口服递送瓶颈的给药机器人具有重要的科学意义与社会价值。但是,现有研究大多缺乏对胃肠道运动特性的考虑,普遍利用外场或者通过弹簧等机械结构的弹性势能来驱动口服给药机器人,难以实现对机器人与胃肠道交互的有效控制,导致药物递送效率受限,且其刚性结构容易导致消化道损伤。
针对上述领域痛点,研究团队巧辟蹊径,发明了肠蠕动驱动的柔性可降解微针机器人,实现了生物类药物的安全口服递送。首先,研究团队探究了肠道蠕动的压强和“收缩-舒张”周期等动力学特性和规律,为口服给药机器人与肠道动态交互过程的力学建模奠定了基础。其次,基于上述力学特性设计了仿刺鲀口服给药机器人,建立了可降解水凝胶机器人的力学平衡模型,优化了机器人的外形尺寸、弹性模量、填充率和微针形状等关键参数,实现了机器人与肠道交互过程中的柔顺控制。最后,在14头巴马猪体内进行的实验表明该口服给药微针机器人的胰岛素递送效率较直接口服提高了三十余倍,推动了生物类药物口服递送领域的发展。
文章来源国家自然科学基金委员会,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。





-
2026年第五届机器学习、云计算与智 26

-
2026年第二届计算机视觉与机器学习 627
-
2026年6月优质国际学术会议推荐 1157
-
2026年智慧教育与数据挖掘国际学术 813
-
2026年第11届生物医学信号与图像 697
-
2026资源、化学化工与应用材料国际 2559
-
2026年图像处理与数字创意设计国际 2369
-
2026年机械工程,新能源与电气技术 6849
-
2026年材料科学、低碳技术与动力工 2524
-
2026年海洋科学、水利工程与环境管 06-18

-
2026年环境工程、材料科学与循环经 06-18
-
2026年航空动力、流体力学与热物理 06-18
-
2026年地球化学、核物理与地质学国 06-18
-
2026年微机电、物理学与建模仿真国 06-18
-
2026年机械工程、电子技术与自动化 06-18

































-
2026 JCR影响因子正式发布272
-
中国科协发布2025年《重要学术858
-
2026年新锐分区(原中科院期刊5648
-
2025年两院院士增选有效候选人5280
-
好学术:科研网址导航|学术头条分6842
-
2025年国际期刊预警名单发布!7028
-
2025年中科院期刊分区表重磅发24788
-
吉林大学校长张希:学术会议中的提8093
-
研究表明太阳耀斑终端激波可作为地06-24
-
研究揭示藻—菌共生体系强化养殖尾06-24
-
双功能手性双核镍催化研究获进展06-24
-
研究发现银河系中心极端环境下大质06-24
-
废塑料升级利用研究取得进展06-24
-
硒太阳能电池研究取得进展06-24
-
南京大学王涛团队首次发现110亿06-24
-
青海省海北州 18539

-
西藏昌都国际旅行社 拉萨旭 21106
-
北京联合大学信息学院 23430
-
湖北研学博科文化传播有限公司 24344
-
IEEE计算智能协会 18941
-
南京邮电大学计算机学院 22681
-
北京大学 2460
-
辽宁省细胞生物学学会 2350
-
华南师范大学教育信息技术学院 18441
-
中国化工企业管理协会 8388
-
中健联盟(北京)养老服务有限公司 8425
-
齐鲁企业论坛管理中心 18601
-
艾会网 3277
-
北京师范大学 21611
-
梵净山红豆杉开发有限公司 18349
-
湖北大学化工厂 18333
-
中国科学院深圳先进技术研究院 21368
-
IAASE 8404
-
IAASE 8370
-
中国航空综合技术研究所 24512



