















电子科技大学机电学院吴一川/彭倍团队在《自然·通讯》发文报道新型“电子蟑螂”软体微型机器人
2025/08/02
 389
389近日,机械与电气工程学院吴一川/彭倍团队在《自然·通讯》(Nature Communications)上发表题为“单驱动器无线软体微型机器人实现灵活导航”(Untethered soft microrobot driven by a single actuator for agile navigations)的研究论文,报道了一款新型具备高机动性与强稳健性的“电子蟑螂”软体微型机器人。该论文由电子科技大学与清华大学合作完成。论文的第一作者及通讯作者为电子科技大学机电学院吴一川副教授,论文的资深指导作者为彭倍教授。其他作者还包括机电学院硕士生曹来、陆国彬,博士生冉龙骐,以及清华大学机械工程系硕士王鹏。电子科技大学机电学院为论文的第一完成单位和唯一通讯单位。
研究人员研制出一款重约1克、长约2厘米的软体微型机器人。该机器人采用巧妙设计的柔性机构,通过调节单个驱动器的频率,便可灵活控制腿部末端运动轨迹的形状、方向与倾斜角度,展现出高度的可控性与系统集成度,实现了以往通常需多个驱动器才能完成的轨迹可控运动。实验结果显示,该机器人在同类型的无线微型机器人中展现出领先的运动性能,正面和反面姿态均具备灵活的运动控制能力。同时,还实现了闭环路径跟踪、水陆两栖运动。值得一提的是,该机器人结构设计具有良好的韧性和抗冲击性能,即使受到成人踩踏等强烈外部冲击后,依然能够保持良好的运行状态,体现出如“小强”般的顽强生命力,为其在复杂和极端环境中的实际应用奠定了基础。该项成果展示了我校在昆虫仿生微型机器人领域的积极探索,也为机器人在灾害救援、管道巡检、狭小空间作业等应用场景提供了新的技术思路和理论支持。
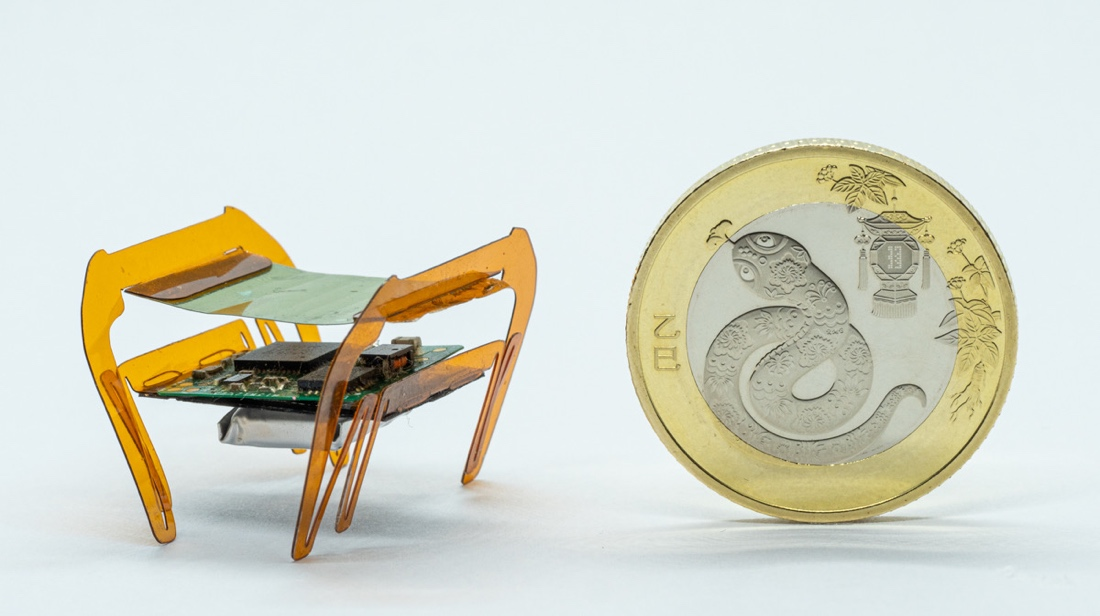
“电子蟑螂”机器人实物图,大小与一枚硬币相当
电子科技大学彭倍教授牵头的机器人与无人系统团队,长期深耕机器人技术领域,具备坚实的理论基础与雄厚的技术积累。依托学校在电子信息与智能制造交叉学科的优势,团队在跨尺度机器人、智能感知与集群协同控制等方向形成了鲜明的技术特色。近年来,团队在 Science Robotics、Nature Communications、Soft Robotics 等期刊发表多篇研究成果,展现出强劲的原创科研实力。团队主持和参与了国家科技重大专项、国家重点研发计划、国家自然科学基金等国家级项目,荣获国家科技进步二等奖、四川省科技进步一等奖等重要奖项,为推动机器人技术的发展作出了积极贡献。
文章来源电子科技大学,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。





-
2026年第五届机器学习、云计算与智 26

-
2026年第二届计算机视觉与机器学习 627
-
2026年6月优质国际学术会议推荐 1157
-
2026年智慧教育与数据挖掘国际学术 813
-
2026年第11届生物医学信号与图像 697
-
2026资源、化学化工与应用材料国际 2559
-
2026年图像处理与数字创意设计国际 2369
-
2026年机械工程,新能源与电气技术 6849
-
2026年材料科学、低碳技术与动力工 2524
-
2026年海洋科学、水利工程与环境管 06-18

-
2026年环境工程、材料科学与循环经 06-18
-
2026年航空动力、流体力学与热物理 06-18
-
2026年地球化学、核物理与地质学国 06-18
-
2026年微机电、物理学与建模仿真国 06-18
-
2026年机械工程、电子技术与自动化 06-18

































-
2026 JCR影响因子正式发布272
-
中国科协发布2025年《重要学术858
-
2026年新锐分区(原中科院期刊5648
-
2025年两院院士增选有效候选人5280
-
好学术:科研网址导航|学术头条分6842
-
2025年国际期刊预警名单发布!7028
-
2025年中科院期刊分区表重磅发24788
-
吉林大学校长张希:学术会议中的提8093
-
研究表明太阳耀斑终端激波可作为地06-24
-
研究揭示藻—菌共生体系强化养殖尾06-24
-
双功能手性双核镍催化研究获进展06-24
-
研究发现银河系中心极端环境下大质06-24
-
废塑料升级利用研究取得进展06-24
-
硒太阳能电池研究取得进展06-24
-
南京大学王涛团队首次发现110亿06-24
-
南京市长江都市建筑设计股份有限公 2315

-
香港机械工程师协会 23369
-
娄底 21349
-
北京大学医学部 2599
-
烟台群英会议服务有限公司 24464
-
中国传媒大学 21477
-
北京建筑工程学院土木与交通学院 23330
-
四川大学华西药学院 21342
-
中国科学院 8653
-
北京合力飞扬文化有限公司 18397
-
农民权益保护与区域发展研究中心 2492
-
华侨大学化工学院 18390
-
北京亿阳万泰文化传播有限公司 18468
-
百奥泰国际有限公司 23324
-
中国医师协会健康睡眠促进中心 18313
-
上海电子信息 23508
-
上海景桥会展服务有限公司 18730
-
黑龙江大学水利电力学院 2748
-
山东飞鲨国际展览有限公司 2367
-
武汉理工大学 8703



