















我国学者在光响应粘合剂控制凝胶和机器人功能定制方面取得进展
2025/06/02
 274
274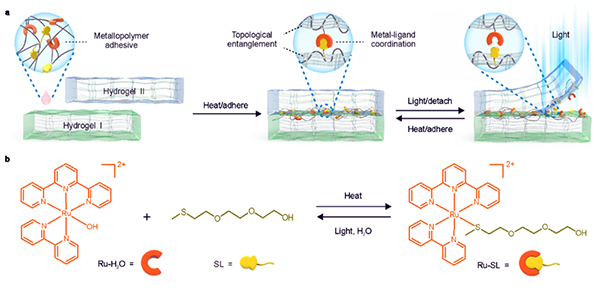 |
图1 Ru-S键作为可逆光交联点的水凝胶粘合剂
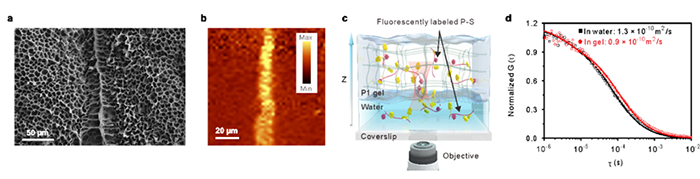
图2 粘合剂与被粘水凝胶的界面互穿网络结构的表征及其形成机制
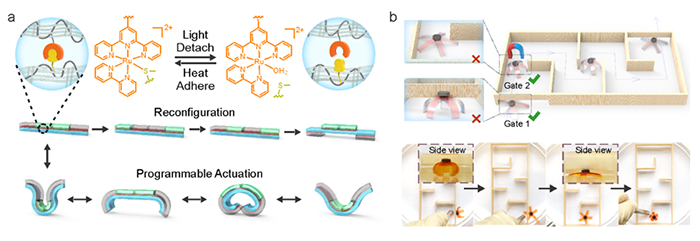
图3 通过光控可逆粘合设计的可重构水凝胶组装体和软体机器人的迷宫导航
在国家自然科学基金项目(批准号:52120105004、52073268)等资助下,中国科学技术大学合肥微尺度物质科学国家研究中心、中国科学院软物质化学重点实验室、安徽省光电子科学与技术重点实验室、高分子科学与工程系吴思教授课题组与合作者在可逆光交联高分子构建的粘合剂及其在水凝胶组装体和软体机器人的功能定制领域取得进展,相关成果以“利用光控制的金属配位聚合物粘合剂重新装配凝胶组装体以实现多重功能定制(Reconfiguring hydrogel assemblies using a photocontrolled metallopolymer adhesive for multiple customized functions)”为题,于2024年3月8日在线发表于《自然•化学》(Nature Chemistry)杂志。论文链接:https://www.nature.com/articles/s41557-024-01476-2。
东方神话中的孙悟空和西方科幻动画中的变形金刚都对设计可变形材料和机器人产生了深刻的启发。将功能、材质、形状和尺寸不同的水凝胶基元进行可控粘合是一种制造可变形材料和软体机器人的新方法。按需控制水凝胶基元之间的粘合是实现这一制造方法的难点,这是因为:(1)水凝胶的主要成分是水,不具备像固体一样的轮廓分明的表面可供粘合;(2)水凝胶的体积或形状的变化可能会破坏粘合层;(3)一般的粘合剂无法满足智能材料和软体机器人的部件可拆卸、可重构、可编程的要求。
针对上述挑战,研究人员利用Ru-S键设计了可逆光交联高分子粘合剂。这种粘合剂利用其与被粘水凝胶之间形成的界面互穿网络和配位交联作用牢固地粘结水凝胶。即使在水凝胶受到热或pH刺激而发生体积和形状变化时,这种粘合作用依旧牢不可破。此外,当被粘水凝胶需要拆卸和重新组装时,粘合剂可以在较强的光照下可逆脱粘(图1)。研究人员通过多种研究手段揭示了粘合剂与被粘水凝胶的界面处存在互穿网络结构,并阐明了界面互穿网络结构是通过高分子链的自由扩散、受限扩散和氢键重组的机制形成的(图2)。最后,研究人员利用可逆粘合剂构建了具有定制形状的可重构水凝胶组装体和软体机器人,实现了可重新编程的致动功能和迷宫导航(图3)。本工作为开发新的可逆化学、功能高分子,界面拓扑结构、智能材料和软体机器人提供了新思路。
文章来源国家自然科学基金委员会,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。





-
2026年第五届机器学习、云计算与智 26

-
2026年第二届计算机视觉与机器学习 627
-
2026年6月优质国际学术会议推荐 1157
-
2026年智慧教育与数据挖掘国际学术 813
-
2026年第11届生物医学信号与图像 697
-
2026资源、化学化工与应用材料国际 2559
-
2026年图像处理与数字创意设计国际 2369
-
2026年机械工程,新能源与电气技术 6849
-
2026年材料科学、低碳技术与动力工 2524
-
2026年海洋科学、水利工程与环境管 06-18

-
2026年环境工程、材料科学与循环经 06-18
-
2026年航空动力、流体力学与热物理 06-18
-
2026年地球化学、核物理与地质学国 06-18
-
2026年微机电、物理学与建模仿真国 06-18
-
2026年机械工程、电子技术与自动化 06-18

































-
2026 JCR影响因子正式发布272
-
中国科协发布2025年《重要学术858
-
2026年新锐分区(原中科院期刊5648
-
2025年两院院士增选有效候选人5280
-
好学术:科研网址导航|学术头条分6842
-
2025年国际期刊预警名单发布!7028
-
2025年中科院期刊分区表重磅发24788
-
吉林大学校长张希:学术会议中的提8093
-
研究表明太阳耀斑终端激波可作为地06-24
-
研究揭示藻—菌共生体系强化养殖尾06-24
-
双功能手性双核镍催化研究获进展06-24
-
研究发现银河系中心极端环境下大质06-24
-
废塑料升级利用研究取得进展06-24
-
硒太阳能电池研究取得进展06-24
-
南京大学王涛团队首次发现110亿06-24
-
南京雅苏达教育咨询有限公司 21462

-
《环球杂志》 21820
-
山东大学化学学院 21730
-
香港机械工程师协会 2331
-
呼伦贝尔金辉旅行社 18362
-
银河信息技术学院 18389
-
东北师范大学 21456
-
广州威凯检测技术研究院 2692
-
北京密安网络技术股份有限公司 21349
-
武汉奔诚文化传播有限公司 9017
-
广州市臻阅会展服务有限公司 2623
-
信息技术与工业工程研究中心 23356
-
VFRWGRE 24236
-
International As 8446
-
qa 24422
-
涿州众智会务服务有限公司 8486
-
西安海外会议服务公司 23586
-
武汉海讯科技会务有限公司 18789
-
WILL 24279
-
中国化工企业管理协会 23369



