















南方科技大学在柔性触觉电子皮肤研究方面取得进展
2024/04/11
 1105
1105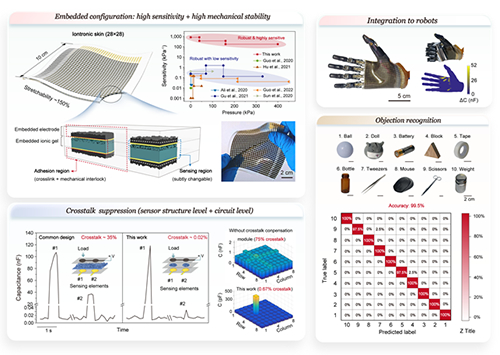 |
图 触觉传感阵列的构建过程与性能示意图
在国家自然科学基金项目(批准号:T2225017、52073138)等资助下,南方科技大学郭传飞研究团队设计了一种新型的柔性触觉电子皮肤,并在机械手触控研究中取得进展。研究成果以“具有嵌入式传感单元,可用于机器人领域的鲁棒、高灵敏且无串扰的离电型蒙皮(Embedment of sensing elements for robust, highly sensitive, and crosstalk-free iontronic skins for robotics applications)”为题,于2023年3月3日发表在《科学进展》(Science Advances)上,论文链接:https://www.science.org/doi/10.1126/sciadv.adf8831。
柔性触觉电子皮肤具有与人体触觉传感器相仿的功能。电子皮肤作为机器人外表面蒙皮可为机器人提供丰富的触觉信息,促进机器人控制领域及新一代人机交互领域的发展。如何在提升触觉灵敏度的同时保持传感器的机械稳定性是柔性电子皮肤研究领域的一大挑战。
针对上述挑战,该研究团队通过将聚二甲基硅氧烷(PDMS)基体与具有表面微结构的离子凝胶活性材料进行横向化学交联,实现了粘接区域和传感区域有效分隔。微结构离子凝胶传感器实现了>174 kPa-1的超高灵敏度(在0.15 Pa 至400 kPa压力范围)。微结构与电极之间存在的空腔能钉扎剪切过程中的裂纹,结合孔间内壁大形变带来的能量耗散,使得这种“嵌入式结构”获得了相对于纯材料更高的界面强度与界面韧性。此外,离子凝胶材料的分隔屏蔽效应与后端信号采集电路的解串扰设计极大地消除了触觉传感阵列内的信号串扰,保证了信号采集的准确性。在应用方面,由弹性体构成的传感蒙皮可共形贴附于机械手表面,触觉感知结合机器学习算法赋予了机械手99.5%的抓握识别准确率,这充分展示了蒙皮在机器人领域的应用潜力。该成果对发展新型柔性触觉电子皮肤有重要借鉴意义。
文章来源国家自然科学基金委员会,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。





-
2026年第五届机器学习、云计算与智 26

-
2026年第二届计算机视觉与机器学习 627
-
2026年6月优质国际学术会议推荐 1157
-
2026年智慧教育与数据挖掘国际学术 813
-
2026年第11届生物医学信号与图像 697
-
2026资源、化学化工与应用材料国际 2559
-
2026年图像处理与数字创意设计国际 2369
-
2026年机械工程,新能源与电气技术 6849
-
2026年材料科学、低碳技术与动力工 2524
-
2026年海洋科学、水利工程与环境管 06-18

-
2026年环境工程、材料科学与循环经 06-18
-
2026年航空动力、流体力学与热物理 06-18
-
2026年地球化学、核物理与地质学国 06-18
-
2026年微机电、物理学与建模仿真国 06-18
-
2026年机械工程、电子技术与自动化 06-18

































-
2026 JCR影响因子正式发布272
-
中国科协发布2025年《重要学术858
-
2026年新锐分区(原中科院期刊5648
-
2025年两院院士增选有效候选人5280
-
好学术:科研网址导航|学术头条分6842
-
2025年国际期刊预警名单发布!7028
-
2025年中科院期刊分区表重磅发24788
-
吉林大学校长张希:学术会议中的提8093
-
研究表明太阳耀斑终端激波可作为地06-24
-
研究揭示藻—菌共生体系强化养殖尾06-24
-
双功能手性双核镍催化研究获进展06-24
-
研究发现银河系中心极端环境下大质06-24
-
废塑料升级利用研究取得进展06-24
-
硒太阳能电池研究取得进展06-24
-
南京大学王涛团队首次发现110亿06-24
-
海纳集团 23899

-
悉地(苏州)勘察设计顾问有限公司 8599
-
中国杂志社 23372
-
河海大学 8533
-
浙江科技学院生物与化学工程学院 23673
-
华源科创(北京)信息咨询有限公司 8538
-
上海同济大学 21343
-
武汉木兰湖旅游风景区 25164
-
西北第二民族学院 21338
-
天津市塘沽区土地中心 18252
-
上海季泽会展服务有限公司 25234
-
洛阳青创文化传播有限公司 8466
-
云南农业大学水利水电与建筑学院 21447
-
上海维程计算机信息技术公司 23510
-
安徽绩溪网络技术有限公司 18392
-
西安理工大学 24828
-
中国针灸推拿协会 24701
-
海南国际医药创新联合基金会 8530
-
上海首美展览有限公司 8482
-
广东心域广告传媒有限公司 23447



