















�˹������о�Ժ�����μ��������ڡ����������е�ѧϰ���ơ��о�ȡ�ý�չ
2024/04/15
 859
859���գ��˹������о�Ժ���������������Ŷ���NeruIPS�������ġ�On the Learning Mechanisms in Physical Reasoning������������������������ѧϰ���Ƶĸ��������ֱ���������ͻ��ڶ�̬�켣��������
�����ڽ�������е���������ʱ������������ģʽ����һ���ǻ���ֱ�������������翴��һ���ѵ������壬�ܹ�ֱ��ͨ��ֱ��Ѹ���жϳ��Ƿ�ᵹ����ͼ1���ڶ����ǻ��ڶ�̬�켣�������������ڶ����彻������Ϸ��ͨ�������������˶��켣���ж����յ���Ϸ״̬����ͼ2�е�����������Ϸ[2]��

ͼ1���ж϶ѵ��������Ƿ��ȶ�[1]
ͼ2������������Ϸ��ͨ������һ������ʹ�ú�����ɫ����
��ǰ�о����ձ���Ϊ��������ิ������������Ϸ��Ҫ���ڶ�̬�켣Ԥ�⣬������ѵ��һ����̬�켣Ԥ��ģ��ȥԤ��ÿһ��ʱ��ڵ���������״̬��λ�ã��ٶȵȣ���Ȼ��ݴ��ж�������Ϸ��Ŀ���Ƿ�ᱻ�ﵽ [4, 5, 6]��
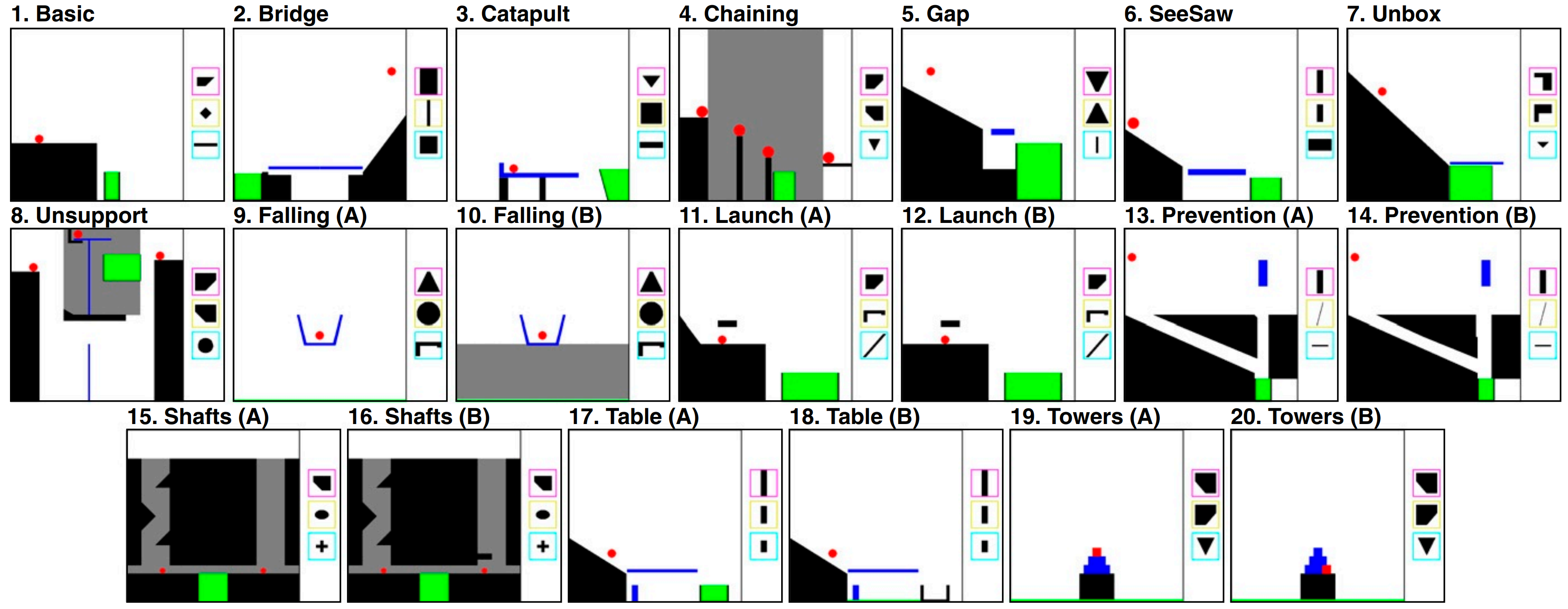
����[8]������ԭ�еļ��裬��ͨ��ʵ��֤����������ͨ��ֱ��Ҳ�ܽ�����ӵ��������⣬��ֻ��������ӳ�ʼ������ѧϰ��Ȼ��ֱ�Ӹ�����������ɹ�����ʧ�ܵ��жϣ�������Ҫ�ӳ�ʼ������Ԥ��δ��������ܵĹ켣��������һ�����Ƶ������������ݼ�PHYRE[3]������ʵ�飬PHYRE�ṩ��һϵ���ڶ�ά�����е��������⣬ÿһ���������ⶼ��һ��Ŀ��״̬��������ɫ����������ɫ�����壩��һ����ʼ״̬����Щ�������ͨ���ڻ����з���һ�������µ����屻�����ģ�������Զ����У����������������Ķ����ܷ�ﵽĿ��״̬������֮�⣬���Ļ�ͨ��ʵ����֤�˴Ӷ�̬�켣��ѧϰ��DZ�ڲ��㣬��Ϊδ�������������о��ṩ�˾���ǰ���ķ����Ĺ�����������ĸ�ʵ����չ����֤��

ͼ3������������ϷPHYRE������https://phyre.ai/��
ʵ��һ������ǰ���й��������ս
�ڵ�һ��ʵ���У����ǽ���ֱ����ѧϰ��ģ�ͺ�Ŀǰ��PHYRE�����ϱ�����õĶ�̬�켣ģ��RPIN�����˱Ƚϣ����ִ�ֱ����ѧϰ��ģ�ʹﵽ�˺�RPINͬ���ı��֣������ڴ�û�����������ϱ��ֳ�����RPIN����һ������������֤�˴�ֱ����ѧϰ�ľ�DZ�������Դӹ켣��ѧϰ�Ĺ��й����������ս��
ʵ�������������������̬�켣������������Ľ����û�а����أ�
�ܵ���һ��ʵ�����������������˵ڶ���ʵ������֤��̬�켣��������������״̬���ж��Ƿ����á�Ϊ�˻ش�������⣬���Ĵ�ģ������ֱ�ӳ�ȡ�˸����������ʵ�˶��켣���ݴ����������ж��ܷ�ﵽ���յ�Ŀ�꣬ʵ�������֣���������������Ϸ�������ԣ�within�����Ǵ�δ��������Ϸ�������ԣ�cross���£���������������켣֡�������ࣨ1��2��4��8������������������Ϸ�ı��ֶ����ã���ͼ2�����ɴ˵ó����ۣ�����ṩȷ�Ĺ켣����̬Ԥ������������Ľ���а�����
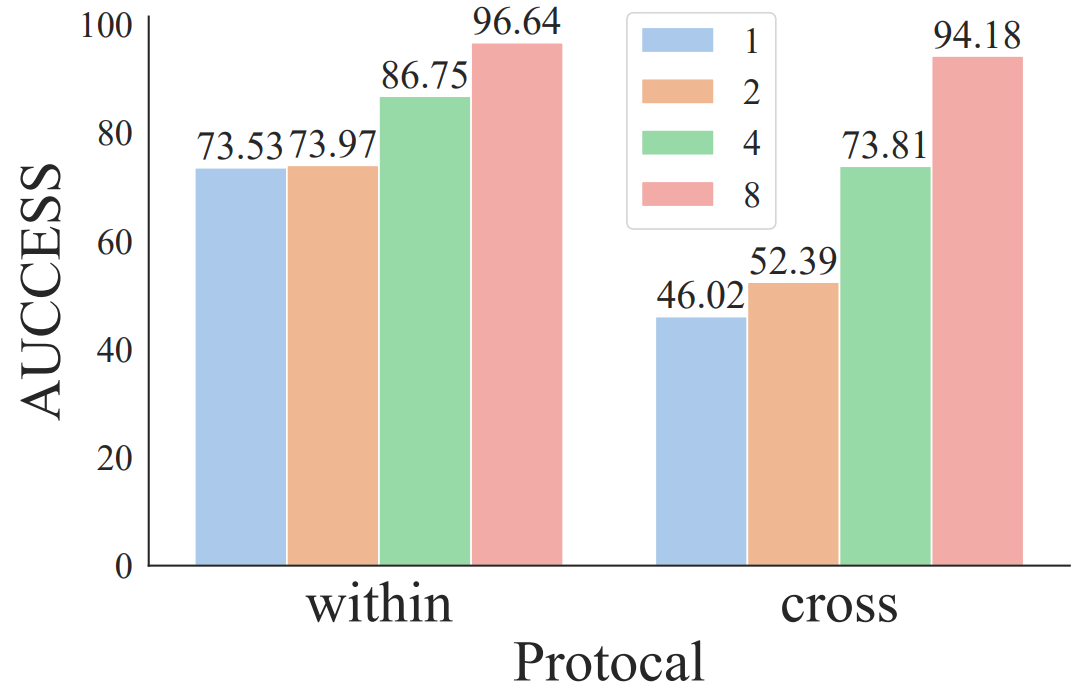
ͼ4����������������Ϸ�ı���������켣֡���ı仯
ʵ������Ϊʲôʵ��Ӧ���У���̬�켣����������Ľ��û�а����أ�
��ô��Ȼ��̬�켣Ԥ�������������Ľ��ȷʵ���ã���Ϊʲôʵ��Ӧ���У�ͨ����ƶ�̬ģ��Ԥ��켣������������Ľ��û�л��������أ�Ϊ�˻ش�������⣬���������һ�ֶ�̬�켣Ԥ��ģ�ͣ�ͨ���ϸ�ı������ƣ�����������ʵ�顣����أ��Ա���ֱ��ģ�ͣ�ֻ������״̬�ж�ģ�飩�����ж�̬Ԥ��ģ�ͣ���ѵ����̬Ԥ��ģ�飬��ѵ������״̬�ж�ģ�飩�Ͳ��ж�̬Ԥ��ģ�ͣ�ͬʱѵ����̬Ԥ��ģ�������״̬�ж�ģ�飩����ͬѵ�������µı��֣�ʵ������ʾ��
���ж�̬Ԥ��ģ�ͱ��ֻ�����ֱ��ģ�ͣ���Ϊ��̬Ԥ��ģ����ѻ����ʵ����еľ��켣�����Ը�����������״̬�ж�ģ������������������������Ľ�������˸���Ӱ�졣
���ж�̬Ԥ��ģ���˻�����ֱ��ģ�ͣ���Ϊͬʱѵ����̬Ԥ��ģ�������״̬�ж�ģ�������ģ�ͽ�����ע����ת�Ƶ���������״̬���ж��ϣ�ͨ�����Ӷ�̬Ԥ��ģ��Ԥ����Ĺ켣������������ĸ�����š�
ͨ����������Եó����ۣ�ʵ����ƵĴӹ켣��ѧϰ��ģ����Ϊ���ɱ���ؾ��в�ȷ�Ժ����������Է�����������������״̬���жϣ����ֽ��ƻ���ֱ��ģ�͡�
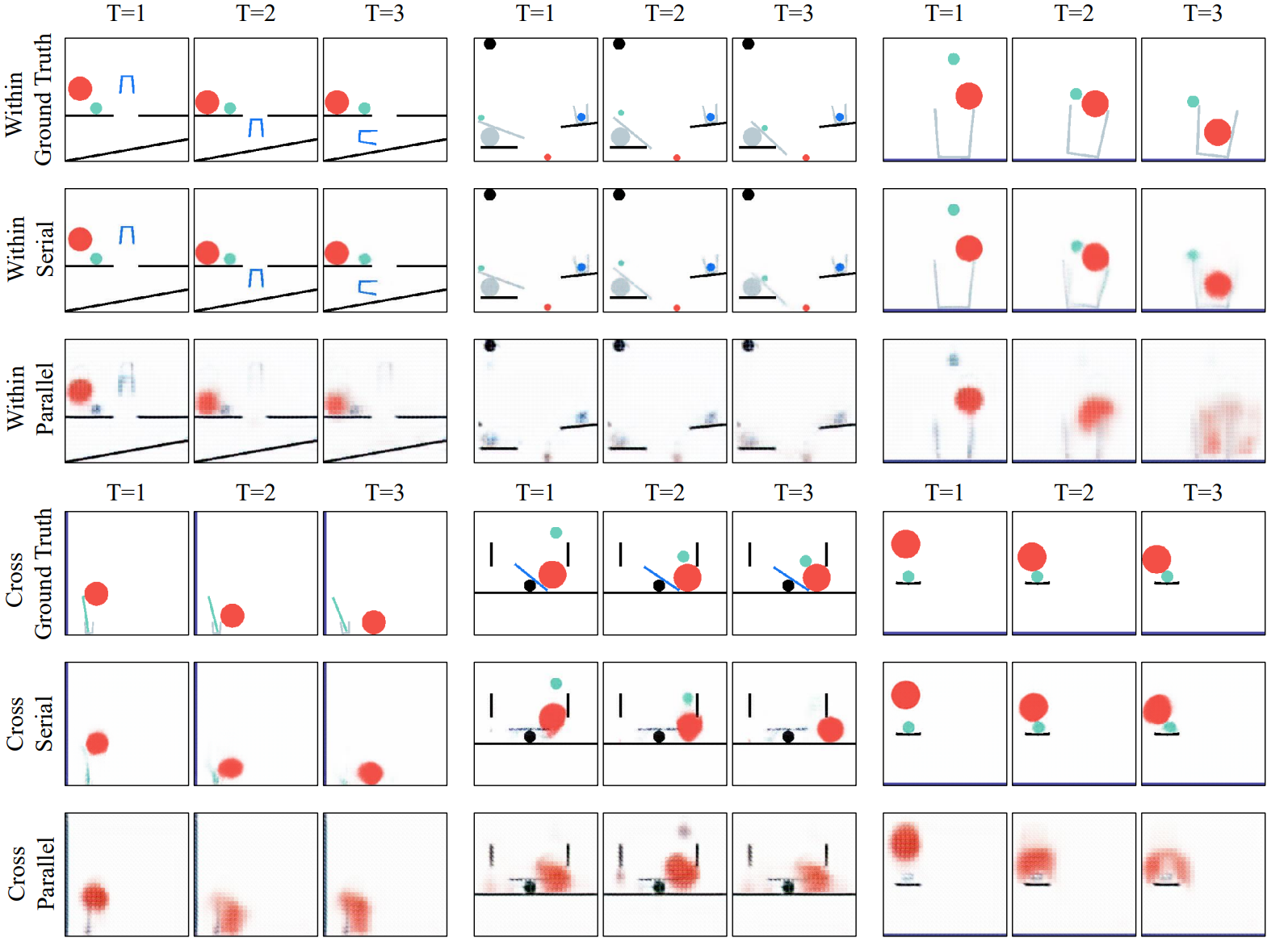
ͼ5�����в��ж�̬Ԥ��ģ��Ԥ����Ĺ켣
ʵ���ģ������ֱ��ģ��
���ڴˣ���������˵��ĸ�ʵ�飬���Բ��Ը����ֱ����ѧϰ��ģ������һ����֤����Ч�ԡ�ʵ�������֣���Щģ�ʹﵽ�˻��˴ӹ켣��ѧϰ��ģ�͵ı��֣�����1�������Ҵ�ֱ����ѧϰ��ģ�����̼�Ҳ�����������ó�ʶ֪ʶ��AI�еİ�����[7]������Ϸ���ֱ�����жϣ�����õĺ�ɫС��Ӧ���ھ���������Խ��ĵط������ܹ�����ʩ��ij��Ӱ�죬��ͼ3������νһ�������Ҹ�Ч�ķ�����

ͼ6��ֱ��ģ�Ͷ�PHYRE��Ϸ�Ľ������

��1����ֱ����ѧϰ�ʹӹ켣��ѧϰģ�͵ı��ֶԱ�
�ڱ����У����ǽ�������������������ѧϰ���Ƶĸ��������ֱ���������ͻ��ڶ�̬�켣����������Ȼ�����ձ���Ϊ�Զ�̬�켣��Ԥ����������������������ʵ��һ��ս����һ�������裺��ֱ��ģ����Ч��ѧϰִ�������������������κ����Ի�����ʵ�Ķ���ල��̬�켣�źš���һΥ��ֱ���ķ��ִ�ʹ�������ɶ�̬�켣��Ԥ���Ƿ������������з�����Ҫ���á�ͨ��ʵ��������Ƿ��ֶ�̬�켣��Ԥ�������߽�������������ͨ��ʵ���������ǽ�һ��̽����Ϊʲô��̬�켣Ԥ��ģ�������������б��ֲ��ѡ�����ע������ӵĶ�̬Ԥ����������������ܲ�������Ӱ�죻�ڲ��ж�̬Ԥ��ģ���У���̬�켣Ԥ��ģ���˻���ֱ��ģ�͡������Ʋ⣬�ӳ�Զ��������̬Ԥ��IJ�ȷ���Բ��ɱ�����ۻ����������ձ��ֲ��ѡ�ͨ��ʵ���ģ����������о������ֱ��ģ�Ͳ������ PHYRE �е����ܡ�
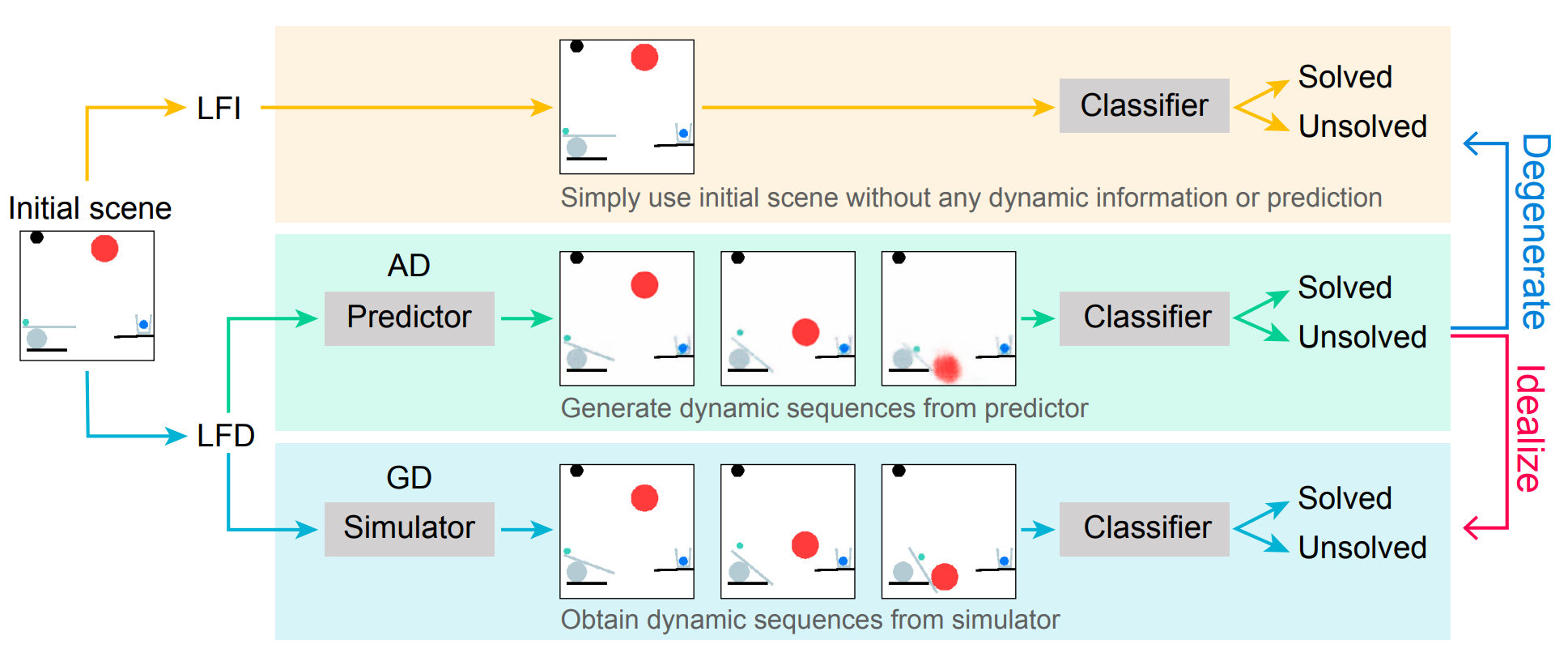
ͼ7�������о�˼·
Ϊʲô��̬�켣Ԥ��ģ����������ȷ��Ԥ�⣿�����ܽ������¿��ܵ�ԭ��
?��̬�켣Ԥ�Ȿ��������ս�ԣ���������ȫ�µij����С�һ���棬Ԥ�ⳤ�ι켣�����������ѵģ���ΪһЩ����֮��Ľ�����������ײ������Ԥ�⡣��һ���棬���������ۻ�����������ָ�������������ҵ��ǣ���ǰ�Ķ�̬Ԥ��ģ�����Ƚ���Ԥ�����������е�ȷ�켣��
?�������صı�ʾ�Ȼ�������ı�ʾ���и������Ϣ������������ı�ʾ����ࡣ����˵���������صı�ʾ���ܰ������б�Ҫ����Ϣ������������״��DZ�ڵ���ײ�ͽ��ٶȡ�Ȼ���������ı�ʾ�dz����ӣ����Һ�����ȡ������Ϣ�����֮�£���������ı�ʾ��������Ǽ��ģ�������ѭ�������ɵ�һ��ԭ��Ȼ����������Ϊ���ĵķ����ڳ�����ʧȥ����Ҫ�������������Ƕ�����ײԤ����������û��һ��������ʾ���������ܽ�������ģ�����б�Ҫ��Ϣ����һ��ʵ��һ��ʹ�����������ӻ���
δ���о�չ����
?��ʵ���У�����ʹ���˱Ƚ�ͨ�õ�ֱ��ģ�ͣ�û�����������������ĸ�����ơ�������Ϊ����Ƹ��ܲ������������ռ���Ϣ�ĸ�֪ģ�飬����ǿֱ��ģ�͵ĸ�֪�����ͷ���������
?��Ȼ�����켣Ԥ��dz����ѣ����������ֵ�������������ǰ�������Ƿdz����棬����Ԥ���������������������ã����練��ʵ�����Լ�����������������Ϊ�����켣Ԥ����Ȼ��Ҫ����һ���ĸĽ��������ڴ�������������ͻ�ơ�
���Ĺ�ͬһ��Ϊ����Ǭ��������ѧ������������廪��ѧ����ͨѶ�����ųۣ�����ͨ���˹������о�Ժ���������Σ�������ѧ����
�������
[1] Allen, Kelsey R., Kevin A. Smith, and Joshua B. Tenenbaum. "Rapid trial-and-error learning with simulation supports flexible tool use and physical reasoning." PNAS (2020)
[2] Battaglia, Peter W., Jessica B. Hamrick, and Joshua B. Tenenbaum. "Simulation as an engine of physical scene understanding." PNAS (2013)
[3] Bakhtin, Anton, et al. "Phyre: A new benchmark for physical reasoning." NeurIPS (2019)
[4] Qi, Haozhi et al. "Learning Long-term Visual Dynamics with Region Proposal Interaction Networks", ICLR (2021)
[5] Girdhar, Rohit, et al. "Forward prediction for physical reasoning." arXiv preprint arXiv:2006.10734 (2020)
[6] Harter A, Melnik A, Kumar G, Agarwal D, Garg A, Ritter H. Solving Physics Puzzles by Reasoning about Paths. arXiv:2011.07357 (2020)
[7] Yixin Zhu, Tao Gao, Lifeng Fan, Siyuan Huang, Mark Edmonds, Hangxin Liu, Feng Gao, Chi Zhang, Siyuan Qi, Ying Nian Wu, Joshua B. Tenenbaum, Song-Chun Zhu. "Dark, Beyond Deep: A Paradigm Shift to Cognitive AI with Humanlike Common Sense. " Engineering (2020)
[8] Shiqian Li, Kenwen Wu, Chi Zhang, Yixin Zhu. "On the Learning Mechanisms in Physical Reasoning." NeurIPS (2022)
文章来源������ѧ������,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。





-
2026年第五届机器学习、云计算与智 26

-
2026年第二届计算机视觉与机器学习 627
-
2026年6月优质国际学术会议推荐 1157
-
2026年智慧教育与数据挖掘国际学术 813
-
2026年第11届生物医学信号与图像 697
-
2026资源、化学化工与应用材料国际 2559
-
2026年图像处理与数字创意设计国际 2369
-
2026年机械工程,新能源与电气技术 6849
-
2026年材料科学、低碳技术与动力工 2524
-
2026年海洋科学、水利工程与环境管 06-18

-
2026年环境工程、材料科学与循环经 06-18
-
2026年航空动力、流体力学与热物理 06-18
-
2026年地球化学、核物理与地质学国 06-18
-
2026年微机电、物理学与建模仿真国 06-18
-
2026年机械工程、电子技术与自动化 06-18

































-
2026 JCR影响因子正式发布272
-
中国科协发布2025年《重要学术858
-
2026年新锐分区(原中科院期刊5648
-
2025年两院院士增选有效候选人5280
-
好学术:科研网址导航|学术头条分6842
-
2025年国际期刊预警名单发布!7028
-
2025年中科院期刊分区表重磅发24788
-
吉林大学校长张希:学术会议中的提8093
-
研究表明太阳耀斑终端激波可作为地06-24
-
研究揭示藻—菌共生体系强化养殖尾06-24
-
双功能手性双核镍催化研究获进展06-24
-
研究发现银河系中心极端环境下大质06-24
-
废塑料升级利用研究取得进展06-24
-
硒太阳能电池研究取得进展06-24
-
南京大学王涛团队首次发现110亿06-24
-
�й�ҽҩ����Э�� 21448

-
�����ﻪ��̼Ժ 2228
-
�й��Ƽ��ڿ��༭ѧ�� 18445
-
�й���ѧԺ�о���Ժ���̽���ѧԺ 23520
-
�廪��ѧ�о�Ժ 18557
-
�������չ�˾ 18529
-
�Ͼ�������ѧ 8518
-
IAASE 8323
-
�Ϻ�����������˾ 18246
-
�Ϻ�������Ϣְҵ����ѧԺ 23419
-
�й�����ѧ��ҽѧ 21515
-
�人����˾ 23398
-
������ѧ�Ŵ�ѧ�о��� 21479
-
2017�ڶ�����Դ�����뻷������ 24490
-
�ٰ�̩���ʻ��飨����������˾ 21301
-
���ʹ�ѧ��������Э�� 2387
-
�ٰ�̩ 2549
-
�й���ѧԺ��ѧʱ���� 23545
-
WWX 23277
-
brachy+brachy 23286



