












我国学者在智能软材料系统研究方面取得进展
2025/06/02
 92
92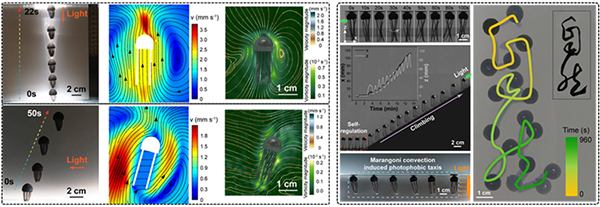 |
图 软材料系统的自主向光、趋光性
在国家自然科学基金项目(批准号:52076127)等资助下,上海交通大学钱小石教授团队与香港大学方绚莱教授合作在智能软材料系统研究方面取得进展。开发了一种整体的、刺激响应的趋光软体载具(PTV),它具有类似水母的对称性几何结构,能够迅速地朝向任意方向的稳定光源自主运动,并根据光源方向的变化,自主实时准确追踪。相关研究成果以“基于光热响应水凝胶趋光载具的水下趋光性运动(Self-regulated underwater phototaxis of photoresponsive hydrogel-based phototactic vehicle)”为题,于2023年8月21日发表在《自然•纳米技术》(Nature Nanotechnology)杂志上。论文链接:https://www.nature.com/articles/s41565-023-01490-4。
生命体依靠刺激反应反馈回路进行自我调节运动,以获取食物和繁殖机会,并以适应性方式远离危险。这些调节运动被称为趋光性、趋旋性、趋流性和趋化性等,它们允许生物体对环境刺激做出决策,并沿着偏好的方向移动。然而,人工系统的控制仍然依赖于预先编程的电子电路控制和人的遥控操作,如磁场操纵、激光的闪烁频率以及空间中的边界限制。如不依赖电子控制或人工干预,仅仅利用均一软材料,人们依然难以实现无拖线、自决策的全空间趋光性运动。
为了突破以上限制,研究团队通过调整高分子水凝胶纳米复合材料内部的光-热-机械-流体相互作用,成功地在简单的均质材料中实现了人工趋光性运动。这种趋光性不依赖于对光源或特殊的边界条件要求。在自然光线的持续照射下,这种软体机器人能够通过自主对流散热来建立负反馈回路以实现对行动方向偏移的自主校准,形式上具有了简单的自主决策的智能,能够在无需外置电子电路设备或人工遥控的情况下,自主、实时、准确地跟踪位置不停变化的辐照源。考虑到这种新型的智能软材料系统仅具有一个负反馈回路,未来如能集成更多控制回路,这种简单的材料系统设计方法有望实现更多、更智能的自主控制功能。
文章来源国家自然科学基金委员会,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。







-
2025年通信网络与智能系统工程国际 07-14

-
2025年8月优质学术会议推荐 346

-
2025年第十二届能源与环境研究国际 315
-
2025年机械工程,新能源与电气技术 499
-
2025年计算机科学、图像分析与信号 472
-
2025年材料化学与燃料电池技术国际 422
-
2025年第四届国际生物医药产业发展 07-23
-
2025年可持续能源、热力学与机械工 07-23
-
2025年量子计算、算法优化与计算理 07-23
-
2025年航空航天技术、智能导航与无 07-23
-
2025年人工智能、大数据与高性能计 07-23
-
2025年机器学习、计算机视觉与智能 07-23
-
2025年心理健康、社会行为与教育国 07-23
-
2025年戏剧影视、艺术美学与文化国 07-23
-
2025年教育创新与人文艺术国际会议 07-23
























-
2025最新JCR分区及影响因子1694
-
好学术:科研网址导航|学术头条分399
-
《时代技术》投稿全攻略:一位审稿408
-
2025年国际期刊预警名单发布!535
-
2025年中科院期刊分区表重磅发3794
-
中科院已正式发布2024年预警期793
-
2025年度国家自然科学基金项目673
-
中国科协《重要学术会议目录(202501
-
2024年国家自然科学基金项目评1064
-
2024年JCR影响因子正式发布1143
-
吉林大学校长张希:学术会议中的提1312
-
分享几种信息检索的方法,高效获取07-23
-
EI检索索引:类型分享,优化你的07-23
-
计算机领域文献的Ei检索:流程详07-23
-
EI检索参考,文献问题分析07-23
-
InfoBeyond Techn 2145

-
东北大学秦皇岛分校 21179
-
佛山美生化妆品有限公司 17922
-
兰州泛海佳乙广告有限公司 17935
-
WILL 24025
-
MNCYR 7891
-
上海冠通展览策划有限公司 24003
-
APISE 20882
-
百奥泰 2125
-
上海市粘接技术协会 21313
-
《实用放射学杂志》编辑部 20940
-
厦门理工学院 1899
-
FREARG 23905
-
三峡大学 2156
-
GRSGE 2103
-
BIT 2032
-
北京电子学会 21283
-
第四军医大学组织工程研发中心 18224
-
北京仁达方略企业管理咨询有限公司 1959
-
香港维科信息产业研究中心 1973



