












北京大学电子学院王兴军教授团队在集成光子机器视觉与感知领域取得重要成果
2025/12/29
 253
25312月23日,北京大学王兴军教授-舒浩文研究员团队、香港城市大学王骋教授团队及上海交通大学周林杰教授团队在Nature Communications在线发表题为“Integrated bionic LiDAR for adaptive 4D machine vision”的研究论文。研究团队提出并验证了一种受人眼视觉机制启发的集成仿生FMCW激光雷达新架构,首次在芯片尺度上实现具备“凝视”能力的自适应并行4D成像系统,并进一步通过与相机协同感知实现4D-plus机器视觉表达,为“高分辨率、低功耗、高灵活性”的下一代智能感知提供了新路径。
文章截图
面向自动驾驶、具身智能与低空智能系统等新兴场景,机器视觉正从“能看见”走向“看得清、看得快、看得全”。一方面,复杂动态环境要求传感系统在大视场范围内保持持续态势感知;另一方面,决策安全性又依赖对关键目标与关键区域提供更高分辨率、更低时延以及更丰富的多维信息支撑。这使得下一代机器视觉在总体上呈现出对高分辨率、低功耗、可扩展并行化的同时需求。
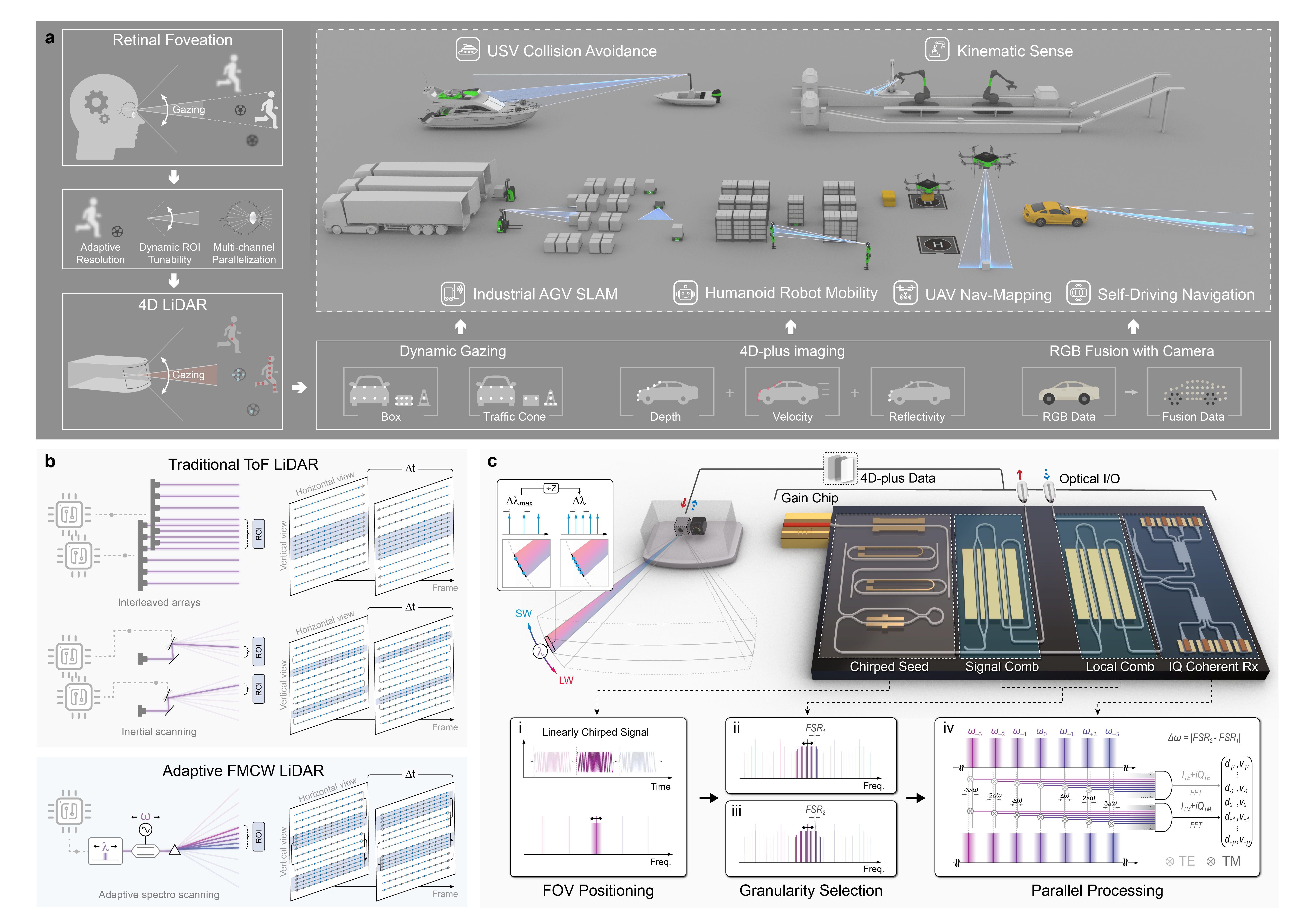
人眼仿生与智能感知应用场景示意图
在这一趋势下,激光雷达作为主动式光学传感器,其性能上限与系统代价的矛盾日益突出。激光雷达的工作本质可以视作对连续物理世界的数字采样,采样点密度以及可获取的信息维度(如距离、速度、反射率等)决定了感知精度与信息表达能力。然而,传统架构提升分辨率往往依赖全视场“堆更多通道、堆更高采样点频”的粗放式扩展,导致光电器件数量、后端高速电子学的带宽与采样处理需求同步攀升,从而在成本、功耗与复杂度上快速逼近工程边界。本质上,这是一条依赖空间维度高密度通道堆叠来提升角分辨率的扩展路径,其边际效益逐步递减而代价持续提升。
对于FMCW激光雷达而言,上述矛盾更为突出。FMCW具备高精度测距、强抗干扰能力,并可同步获取距离与速度等多维信息,但相干链路对光源线宽、调频线性度与相位稳定性提出更严格要求,使单通道链路复杂度与实现成本显著高于非相干方案。也正因如此,行业中常见的“通过空间维度高密度堆叠通道来提升角分辨率”的扩展路径在FMCW体系下更难直接复制,其边际代价更早显现,系统在器件规模、封装堆叠与热管理等方面的工程负担也更难持续承受。相比之下,人眼之所以能够在有限能耗下实现高视敏度,关键在于其并不追求全视场均匀的最高分辨率,而是通过“外围视野+凝视焦点”的机制,将高采样密度按需集中到最重要的区域,以更高的资源利用效率获得更优的感知收益。因此,如何在有限通道预算下构建类似人眼“凝视”的自适应资源分配机制,在提升采样效率的同时获得更高有效分辨率,构成了可扩展高分辨率相干感知的关键科学问题。
为此,研究团队提出“微并行”新架构,并在此基础上研制并验证了具备动态凝视能力的并行FMCW激光雷达原型系统,验证了高分辨率成像不必再单纯依赖空间维度的高密度通道堆叠,而可以通过波长/频域的可重构资源调度实现更高效的分辨率扩展。实验结果表明,系统在局部感兴趣区域内实现0.012°的角分辨率,并在同一系统中兼顾大视场覆盖与高精细成像需求。更为关键的是,薄膜铌酸锂电光频梳与可宽谱调谐外腔激光器的结合,使系统在架构层面实现了“视场覆盖能力”与“局部分辨率需求”的解耦:外腔激光器提供大范围视点移动以保证全局覆盖,电光频梳则在目标区域按需提升采样密度,从而实现“看得广”与“看得清”的协同优化。
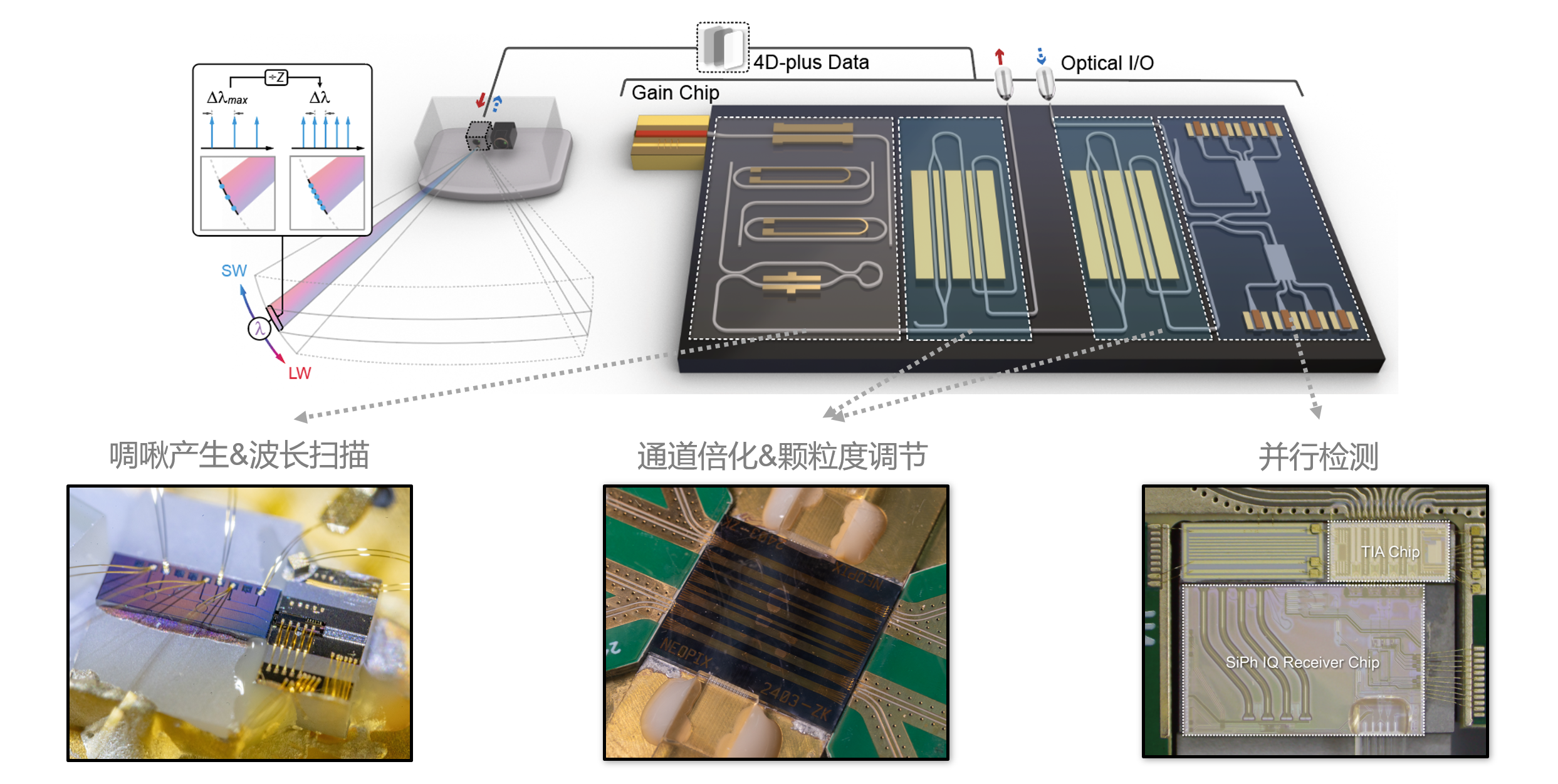
“微并行”FMCW激光雷达系统架构
在此基础上,研究团队进一步演示了首个基于集成光梳的实时并行4D成像系统。在获取三维几何信息的同时,系统可同步解析目标速度与反射率信息,并与可见光相机开展多模态融合,实现点云上色,从而补足激光雷达难以直接获取的颜色外观信息,提升场景可解释性与语义表达能力,形成面向智能体任务的4D-plus场景表征。上述验证表明,该架构通过“凝视”资源分配提升有效采样效率,并将芯片级可重构并行通道作为核心能力支撑,为相干激光雷达走向可扩展、小型化、低功耗的集成化系统方案提供了系统级路径。
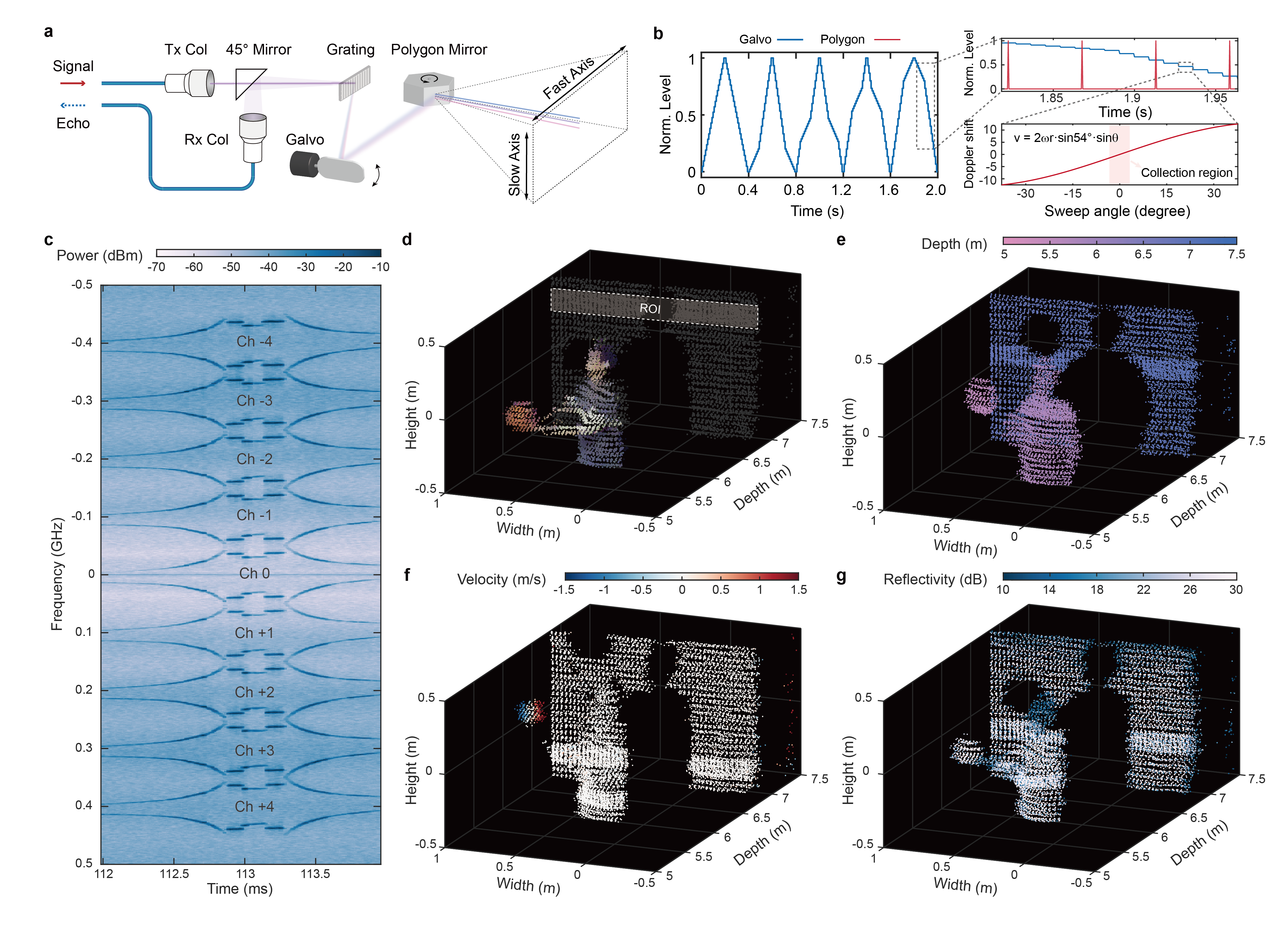
4D-plus实时成像结果
该工作展示的“微并行”相干激光雷达架构为构建集成化、可部署的高分辨率探测模块提供了新的思路:它将高分辨率能力从对空间通道密度堆叠的刚性依赖中解放出来,使硬件在有限通道预算下仍可通过可重构资源调度实现“按需增清”,更符合智能体对体积、功耗与可扩展性的综合约束。同时,这类模块具备可重构、可组合特性,未来通过多模块协同与多模态融合,有望催生出更多仿生机器视觉的形态。本研究展示的集成仿生激光雷达架构具有良好的可扩展性和芯片级集成潜力,为下一代智驾、机器人、无人系统以及空天地一体化感知提供了重要的技术支撑。
本论文的共同第一作者为北京大学电子学院特聘副研究员陈睿轩、博士生吴一晨,香港城市大学张珂博士,上海交通大学刘楚欣博士和北京大学电子学院博士生黎文灿。王兴军、王骋、周林杰以及舒浩文为本文共同通讯作者。香港城市大学博士生陈逸堃,北京大学电子学院博士后沈碧涛,香港城市大学陈朝夕博士,香港城市大学研究助理教授冯寒珂,北京大学长三角光电研究院副研究员葛张峰、周䶮,北京大学电子学院博士后陶子涵、张绪光,上海交通大学许维翰博士,北京大学电子学院博士生王艺蒙以及来自SiFotonics Technologies Co., Ltd.的蔡鹏飞博士、潘栋博士为本文作出了重要贡献。南京理工大学教授何伟基也为本工作提供了宝贵建议。该研究得到了科技部重点研发项目,国家自然科学基金委青年科学基金项目(B类)、青年科学基金项目(C类),中国博士后创新人才支持计划,香港研究资助局项目以及香港裘槎基金的支持。北京大学电子学院光子传输与通信全国重点实验室为该研究的第一完成单位。
文章来源北京大学,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。




-
2026年6月优质国际学术会议推荐 7

-
2026年第17届机械与航空航天工程 193
-
2026年先进航空航天技术与卫星应用 324
-
2026资源、化学化工与应用材料国际 1808
-
2026年图像处理与数字创意设计国际 1632
-
2026年机械工程,新能源与电气技术 6095
-
2026年材料科学、低碳技术与动力工 1819
-
2026年艺术、文化产业与数字媒体国 04-29

-
2026年智慧教育、教育研究与文化交 04-29
-
2026年数字社会、公共管理与经济学 04-29
-
2026 政务服务、数字治理与智慧城 04-28
-
2026 制冷技术、暖通设备与环境调 04-28
-
2026 轻工材料、绿色制造与循环利 04-28
-
2026 多语言智能、翻译技术与国际 04-28
-
2026 生物育种、生态种植与现代农 04-28
























-
中国科协发布2025年《重要学术12
-
2026年新锐分区(原中科院期刊2595
-
2025年两院院士增选有效候选人4402
-
2025最新JCR分区及影响因子12342
-
好学术:科研网址导航|学术头条分5673
-
2025年国际期刊预警名单发布!5837
-
2025年中科院期刊分区表重磅发20812
-
吉林大学校长张希:学术会议中的提6954
-
二维超导迈斯纳效应探测研究获进展04-29
-
研究发现笼目超导体中多重范霍夫奇04-29
-
二氧化碳加氢制高碳烯烃与航煤馏分04-29
-
靶向特定蛋白互作界面抑制乙肝病毒04-29
-
研究揭示内源信使调控膜损伤与细胞04-29
-
科学家绘制大脑星形胶质细胞转录因04-29
-
上海交大Bio-X研究院石毅与合04-29
-
武汉博森学术交流有限公司 8656

-
中国科学院北京纳米能源与系统研究 2444
-
厦门薪源会展服务有限公司 18189
-
上海大学 21306
-
无锡源清天木生物科技有限公司 23589
-
科技与企业杂志社 25216
-
北京两岸行经济文化交流有限公司 18227
-
中国轻工业展览中心 2365
-
湛江中专学校 21245
-
多格公关顾问 18633
-
中国医疗保健国际交流促进会氢分子 2700
-
中国建筑金属结构协会给水排水设备 18403
-
北京工业大学 23499
-
武汉海讯科技会务有限公司 18239
-
荣羿(北京)医学技术有限公司 8238
-
六安市移动公司 21344
-
江西南昌明月风光会展服务有限公司 18310
-
第十届(2017年)中国金融评论 24238
-
北京交通大学经济管理学院 21403
-
重庆市第三军医大学新桥医院心外科 18510



