
















中国科大实现多体量子速度极限
2025/11/07
 236
236我校郭光灿院士团队在量子系统的演化速度极限研究中取得重要进展。该团队李传锋、刘曌地等人通过高精度地控制量子系统演化时间,直接测量了量子系统演化速度,实现了基于可观测量的多体量子速度极限。该成果10月31日发表在国际知名期刊《科学·进展》上。
从能量-时间不确定关系发展而来的量子速度极限从根本上决定了量子系统演化的最大速度,对于实现量子态的快速变换从而实现量子任务具有重要意义。然而,之前的研究工作主要聚焦在单体量子系统的速度极限。实验上如何探索多体量子系统的速度极限,以及噪声会如何影响多体量子系统演化速度,依然是亟待解决的问题。
为了更好的控制量子系统的演化,研究团队前期已进行一系列的研究。首先发展了一套对光子偏振和频率进行完备调控的方法,实现了完全可控的相位退相干量子模拟器[Nat.Commun. 9, 3453 (2018)]。接着,为了量子隐形传态任务中更好的克服噪声,开发了基于非局域记忆效应的方法[Phys. Rev. A 102, 062208 (2020)],和只需对单量子系统进行相位调制的多体混合纠缠方法[Science Advances 10, eadj3435 (2024)]。基于以上成果,研究团队在本工作中设计并实现了基于可观测量的多体量子速度极限实验。
研究团队首先发展了适用于噪声环境的多体量子系统演化速度极限的理论,证实了多体最大纠缠态,多体直积态和单体态的量子速度极限比为N:N:1,其中N为粒子数(图1)。实验中通过高精度控制演化时间直接测量了两体量子系统的演化速度,证实了相比两体直积态和单体量子态,两体最大纠缠态有着最快的演化速度(图2)。接着,实验证实了不同的最大纠缠态也会导致不同的演化速度极限,也就是为了达到最佳演化速度,需要根据任务构建最优的最大纠缠态。最后,在马尔可夫噪声环境中实现了非幺正量子系统演化,证实了即使在噪声环境中,量子系统演化速度极限不仅有最大限制,还有最小限制。
该工作将有助于表征复杂量子系统动力学瞬态特性,并对控制大规模量子系统的演化速度有重要意义。审稿人不仅对该工作本身给予很高评价,还对未来可能的发展给出了指引:“As an outlook, it would be highly interesting to follow up on this experimental research line to analyze non-Markovian and non-Hermitian quantum evolutions and the closely related relation between the stochastic operator variance and OTOC(展望未来,继续沿着这条实验研究路线分析非马尔可夫和非厄米量子演化,以及随机算子方差和非时序关联子之间的密切关系将非常有趣)”。
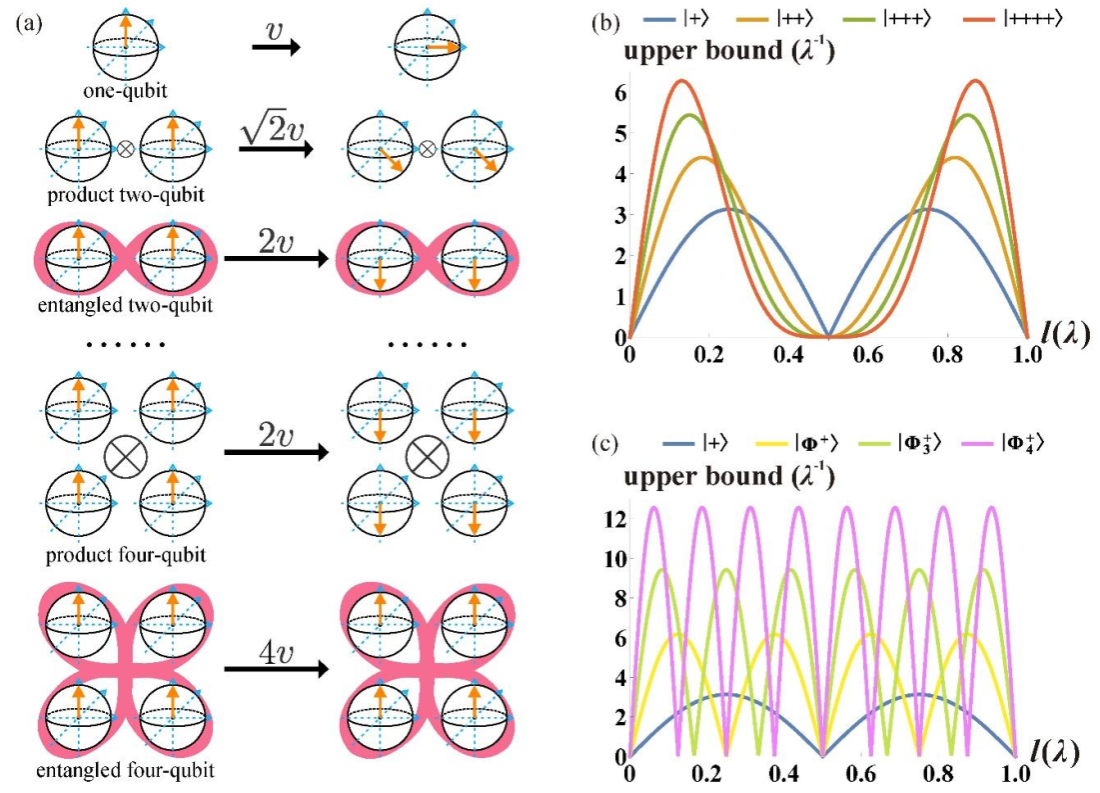
图1 多体直积态和多体纠缠态的加速量子演化示意图
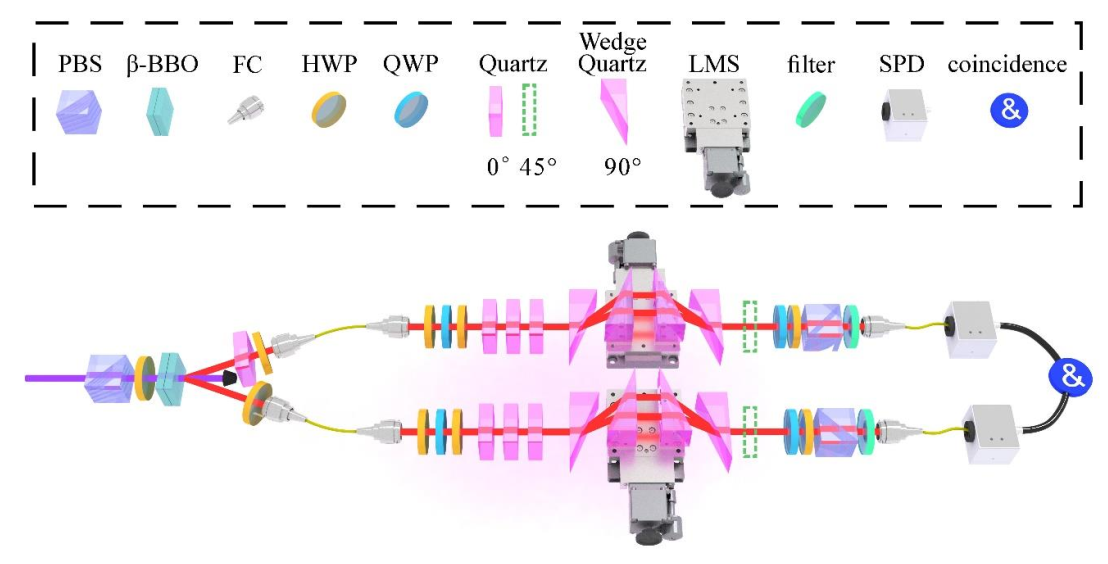
图2 高精度控制量子演化的两体系统实验装置图
量子网络安徽省重点实验室博士研究生苗瑞恒和特任副研究员刘曌地为该工作的共同第一作者。该研究工作得到了合肥国家实验室、国家自然科学基金会和安徽省自然科学基金的资助。
文章来源中国科大,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。




-
2026年9月优质国际学术会议推荐 13

-
2026年第九届可再生能源和电力工程 505
-
2026年第二届计算机视觉与机器学习 1886
-
2026年无人机遥感与人工智能国际会 274
-
2026资源、化学化工与应用材料国际 3615
-
2026年图像处理与数字创意设计国际 3421
-
2026年机械工程,新能源与电气技术 7957
-
2026年材料科学、低碳技术与动力工 3595
-
2026国际增材制造与生物制造会议 07-29

-
中国-武汉(可参会)[ACM] 20 07-28
-
2026海洋科学、探测技术与航海工程 07-27
-
2026建筑规划、环境工程与城市交通 07-27
-
2026医学材料、仿生工程与生物制造 07-27
-
2026机器视觉、模拟仿真与大模型技 07-27
-
2026核物理、量子信息学与电声技术 07-27




























-
2026 JCR影响因子正式发布927
-
中国科协发布2025年《重要学术1478
-
2026年新锐分区(原中科院期刊7824
-
2025年两院院士增选有效候选人5874
-
好学术:科研网址导航|学术头条分7669
-
2025年国际期刊预警名单发布!7904
-
2025年中科院期刊分区表重磅发27877
-
吉林大学校长张希:学术会议中的提8945
-
北京大学生命科学学院焦雨铃团队与07-26
-
清华大学计算机系孙富春团队在具身07-26
-
研究揭示寄主水力性状限制桑寄生抗07-26
-
同域栎树气候适应性策略研究取得进07-26
-
上海交大Bio-X研究院平勇与合07-26
-
上海交大中英国际低碳学院纪亚副教07-26
-
上海交大集成电路学院吴泳澎教授、07-26
-
青岛佰意德电子科技有限公司 18425

-
中科院自动化所 18641
-
神康医院 21475
-
RH 8636
-
IRnet 8537
-
中国稀土学会 23525
-
北京申雅国际会展有限公司 24588
-
中国材料研究学会 21677
-
apise 23375
-
中国市政工程协会 18582
-
农业部中国农村杂志社 23415
-
中国兵工学会测试技术专业委员会 23573
-
浙江工业大学经贸管理学院 21429
-
延边白山国际旅行社有限公司 18580
-
美国科研出版社 2618
-
中国环境科学学会 23717
-
西北农林科技大学 2529
-
天津市电子学会 22157
-
北京邦凯科技公司 18376
-
北京幼盟汇会议服务有限公司 21425



