















中国农业大学|动科学院王勤教授团队研发马匹体尺便携式自动测量系统 效率提升3至7倍
2025/09/05
 312
312近日,我校动物科学技术学院王勤教授团队成功研发出一套基于RGB-D相机的马匹体尺便携式自动测量系统。该系统融合边缘计算技术,实现了对自由活动马匹体尺的高效、精准、无应激测量,为马匹育种与日常管理提供了颠覆性的技术工具。该成果以原创性研究论文形式,在国际知名期刊《智慧农业技术》(Smart Agricultural Technology)在线发表研究论文《一种基于 RGB-D 的育种用无约束马体尺测量便携式设备》(A Portable RGB-D Based Device for Unconstrained Horse Body Size Measurement for Breeding)。
精准的体尺数据是马匹育种选配、健康管理和价值评估的关键依据。传统人工测量方法耗时费力、存在主观误差,且极易引起马匹应激,对自由活动的马群难以实施。现有的自动化测量方法又存在成本高、灵活性差、部署困难等问题。针对这一产业痛点,研究团队创新性地提出了一套集成“识别-验证-定位-校正-计算”五大模块的便携式自动测量方案。
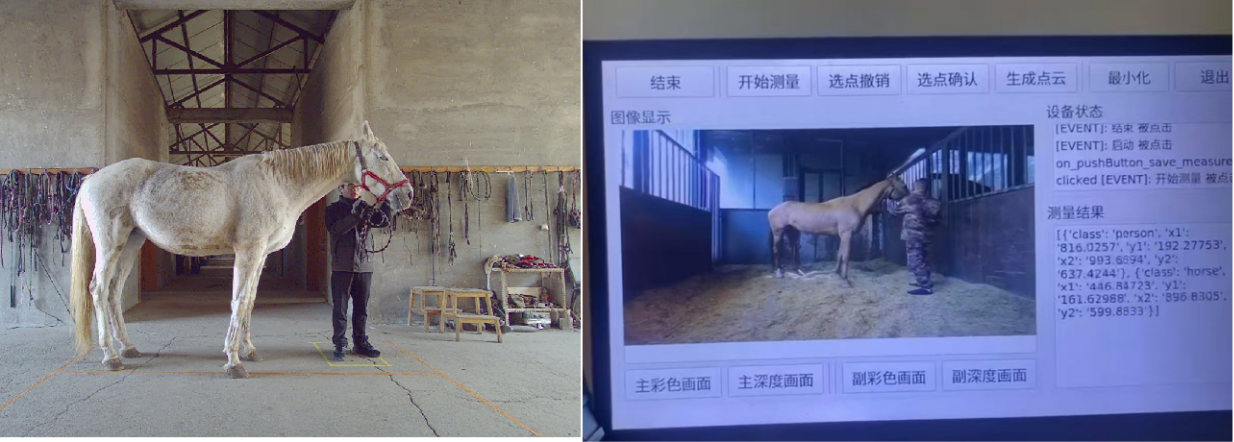
便携式马匹体尺自动测量系统工作示意图
团队设计的便携式设备以RGB-D相机为核心传感器,搭载边缘计算单元和便携电源,单次充电可支持约2.1小时野外测量工作。其核心算法程序能够在马匹自然通过测量区域的瞬间,自动完成以下步骤:马匹识别模块精准捕捉目标;姿态验证模块筛选出符合测量标准姿态的图像帧;测量点定位模块确定关键体尺点;测量点校正模块可辅助人工微调以确保万无一失;最终由计算模块输出体尺数据。
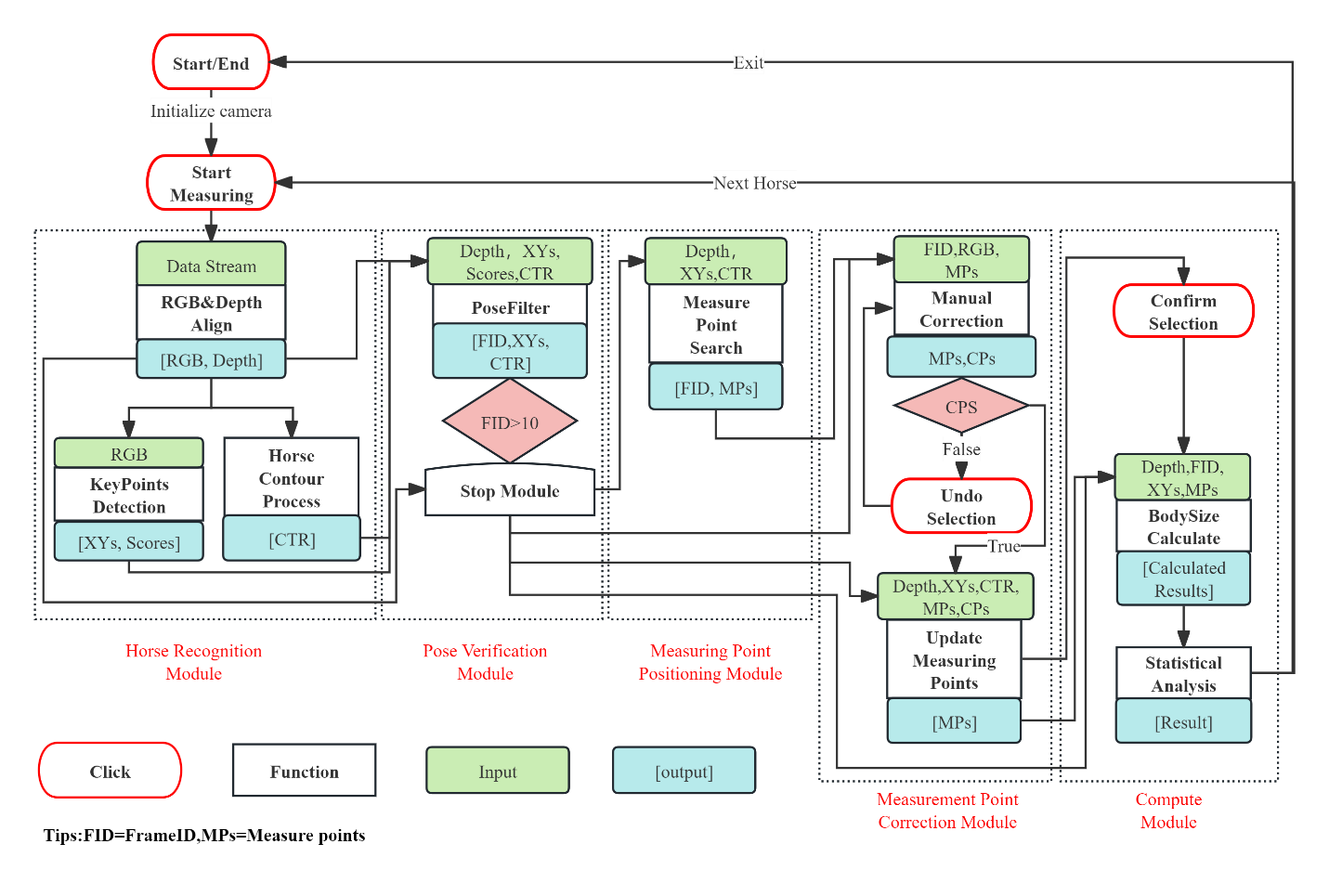
系统五大核心算法模块工作流程
经大量实地测试,该系统表现出卓越的性能。与传统人工测量方式相比,测量效率提升3至7倍,单匹马测量时间仅需35至45秒,且全程无需约束马匹,极大降低了动物应激。在测量精度方面,该系统自动测量结果与人工测量值的平均绝对百分比误差(MAPE) 分别为:体高1.97%、体长2.56%、胸围3.94%、管围7.84%,精度达到实际应用要求。
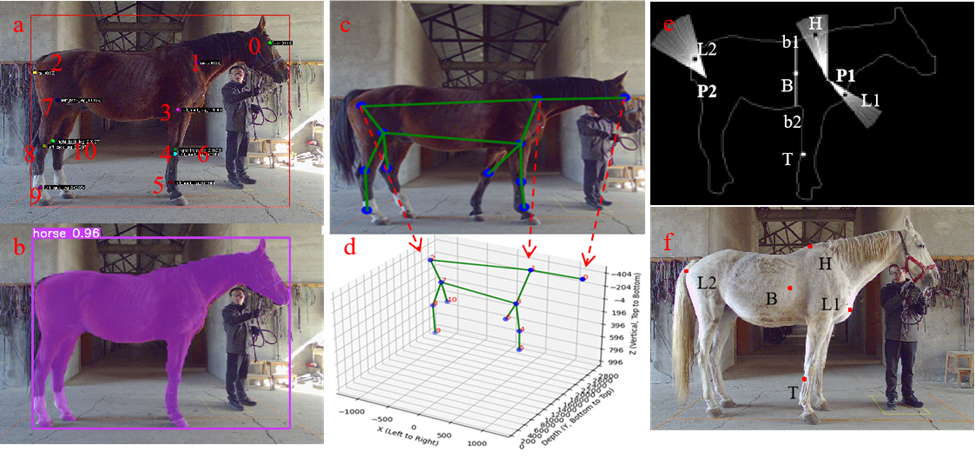
系统中测量参数与计算参数之间的关系综合图表。(a) 识别模块关键点;(b) 轮廓分割;(c) 2D-3D关键点可视化;(d) 测量点搜索图;(e) 测量点可视化;(f) 测量点与推导出的身体尺寸参数之间的对应关系
该研究成果不仅为解决马产业体尺测量难题提供了快速、便携、准确的“农大方案”,更展示了物联网与智能农业装备技术在畜禽养殖领域的巨大应用潜力。该系统适用于品种选育、日常管理、马匹交易和赛前鉴定等多个场景,具有广阔的商业化前景。
中国农业大学为第一完成单位,中国农业大学动物科技学院副教授李建功老师和硕士毕业生叶梦言为第一作者,中国农业大学动物科技学院王勤教授为通讯作者,本研究得到了新疆马产业集群强链补链延链关键技术研究与示范(2022LQ01002)、中国农业大学基本科研业务费(2024RC010与2024TC097)以及太阳花马表型鉴定体系构建(202405510411044)的资助。团队衷心感谢新疆野马文化发展有限公司在本研究实地测量与马匹协调工作中所提供的不可或缺的资源与支持。
文章来源中国农业大学,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。





-
2026年第五届机器学习、云计算与智 26

-
2026年第二届计算机视觉与机器学习 627
-
2026年6月优质国际学术会议推荐 1157
-
2026年智慧教育与数据挖掘国际学术 813
-
2026年第11届生物医学信号与图像 697
-
2026资源、化学化工与应用材料国际 2559
-
2026年图像处理与数字创意设计国际 2369
-
2026年机械工程,新能源与电气技术 6849
-
2026年材料科学、低碳技术与动力工 2524
-
2026年海洋科学、水利工程与环境管 06-18

-
2026年环境工程、材料科学与循环经 06-18
-
2026年航空动力、流体力学与热物理 06-18
-
2026年地球化学、核物理与地质学国 06-18
-
2026年微机电、物理学与建模仿真国 06-18
-
2026年机械工程、电子技术与自动化 06-18

































-
2026 JCR影响因子正式发布272
-
中国科协发布2025年《重要学术858
-
2026年新锐分区(原中科院期刊5648
-
2025年两院院士增选有效候选人5280
-
好学术:科研网址导航|学术头条分6842
-
2025年国际期刊预警名单发布!7028
-
2025年中科院期刊分区表重磅发24788
-
吉林大学校长张希:学术会议中的提8093
-
研究表明太阳耀斑终端激波可作为地06-24
-
研究揭示藻—菌共生体系强化养殖尾06-24
-
双功能手性双核镍催化研究获进展06-24
-
研究发现银河系中心极端环境下大质06-24
-
废塑料升级利用研究取得进展06-24
-
硒太阳能电池研究取得进展06-24
-
南京大学王涛团队首次发现110亿06-24
-
平顶山市九九房地产开发有限公司 18347

-
首都儿科研究所 2532
-
辽宁省医学会学术部 18432
-
欧盟中国经济文化委员会 18476
-
HKSME 24418
-
北京市华夏中医药发展基金会 2863
-
中国石油和化学工业协会培训中心 2396
-
广西师范大学 24790
-
北京军都旅游度假村 18949
-
武汉市cse主办 18374
-
张家界风景文化交流中心 2326
-
北京联佳业广告有限公司 8763
-
北京亚太精达商贸有限公司 2266
-
張家界中國國際旅行社 18392
-
深圳市电子商务协会 18468
-
上海市粘接技术协会 21320
-
GEAT 8480
-
中国科学技术大学 24525
-
国际工学技术出版协会 21341
-
IAASE 21679



