












我国学者在小型深海可变形机器人方面取得进展
2025/06/03
 151
151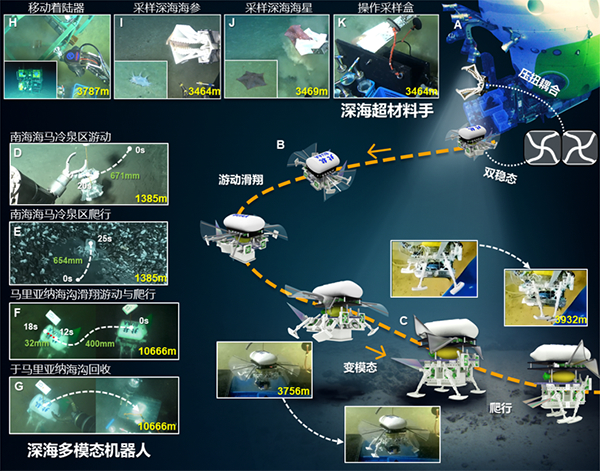
图 基于手性超材料的深海多模态运动机器人与深海柔性手
在国家自然科学基金项目(批准号:62425303、92048302、T2121003、12002016、623B2012、T2125009)等资助下,北京航空航天大学机械工程及自动化学院文力教授团队,与中国科学院深海科学与工程研究所、浙江大学的研究团队开展交叉合作,在深海小型化机器人的高效驱动与多模态运动方面取得进展。研究成果以“具有多模态运动能力的小型深海可变形机器人(Miniature deep-sea morphable robot with multimodal locomotion)”为题,于2025年3月20日发表于《科学·机器人》(Science Robotics)期刊上,成果被该期刊官网首页大图介绍,并被央视《新闻联播》节目及其它媒体报道。论文链接:https://www.science.org/doi/10.1126/scirobotics.adp7821。
深海机器人技术发展面临的核心科学问题在于极端环境条件对其运动性能的显著制约效应。具体而言,这种制约主要体现在两个关键方面:其一,深海高压(约10-110 MPa)与低温(约2~4℃)的耦合作用导致柔性驱动器材料的弹性模量显著提升,进而引起驱动幅值与运动速度的显著衰减;其二,深海海底环境的非结构化特征使得依赖单一运动模态的机器人系统难以实现有效的环境适应与任务执行。
针对上述问题,本研究提出了一种基于力学超材料的深海柔性驱动器设计方法。基于深海低温环境特性,研究集成了具有拮抗结构驱动能力的形状记忆合金材料,系统优化了驱动器关键结构参数,实现了静水压力与驱动性能的正向耦合,显著提升了驱动器的摆动速度和幅值。开发了可变构型的深海小型化机器人,实现了游动、滑翔、爬行三种运动模态的自由切换。机器人搭载“深海勇士号”和“奋斗者号”载人深潜器完成了多地形全海深(海马冷泉1384m、龙西海山3756m、马里亚纳海沟10666m)的共计14次部署。利用手性超材料单元的压-扭耦合效应,提出了一种穿戴式深海柔性抓持器设计方法,解决了以往柔性作业工具空间占用和额外能耗的问题。通过穿戴式的驱动,该抓手成功地实现了3400米深海环境下对软体海洋生物的无损抓取和采样(图)、移动着陆器、开箱操作。
该研究创造性地利用了静水压提升柔性双稳态结构突跳速度和幅度的机制,克服了以往软体驱动器在深海下性能衰减的劣势,突破了深海小型化机器人高效驱动关键技术,将推动小型化驱动器与机器人在深海相关领域的实际应用。
文章来源国家自然科学基金委员会,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。







-
2025年通信网络与智能系统工程国际 07-24

-
2025年8月优质学术会议推荐 508

-
2025年第十二届能源与环境研究国际 367
-
2025年机械工程,新能源与电气技术 538
-
2025年计算机科学、图像分析与信号 524
-
2025年材料化学与燃料电池技术国际 463
-
2025年第九届电力与能源工程国际会 07-28
-
2025年第七届智能自主系统国际会议 07-28
-
2025年IEEE第八届电子与通信工 07-28
-
2025年第十一届机械与电子工程国际 07-28
-
2025年第四届亚洲电力与电气技术会 07-28
-
2025年第十一届机器人与人工智能国 07-28
-
2025年第12届机械、汽车与材料工 07-28
-
2025年第15届通信与网络安全国际 07-28
-
2025年第14届运输和交通工程国际 07-28
























-
2025最新JCR分区及影响因子1829
-
好学术:科研网址导航|学术头条分452
-
《时代技术》投稿全攻略:一位审稿460
-
2025年国际期刊预警名单发布!571
-
2025年中科院期刊分区表重磅发3898
-
中科院已正式发布2024年预警期839
-
2025年度国家自然科学基金项目709
-
中国科协《重要学术会议目录(202620
-
2024年国家自然科学基金项目评1115
-
2024年JCR影响因子正式发布1189
-
吉林大学校长张希:学术会议中的提1364
-
从选题到发表:5个关键步骤攻克S07-28
-
投了学术会议真的可以不参加吗?学07-28
-
EI会议期刊论文怎么写?资深审稿07-28
-
如何在Scopus发文?从选刊到07-28
-
香港中文大学 18086

-
江苏省纳米技术产业创新中心 22983
-
百奥泰国际会议(大连)有限公司 23109
-
中国水电工程顾问集团公司中南勘测 22929
-
北京无界智享科技有限公司 7951
-
闪耀科技(深圳)有限公司 18087
-
武汉金钥匙会务服务有限公司 1831
-
MHTD 1968
-
电子科技大学第十三届小波智能媒体 23059
-
两岸永续与经营管理研讨会 1906
-
武汉理工大学 24210
-
科严文化 1987
-
fdcv 23951
-
江苏如皋软件园 17926
-
HKSME 23871
-
上海信息科技有限公司 2368
-
中国科学院山西煤炭化学研究所 7900
-
澳門科技大學 2145
-
中国环境科学学会 20821
-
昆明兴达会议 24126



