










�廪��ѧ��Ժ��һ�ۿ����鱨�������������κ�����������С�߶�����������ģʽ�ͻ�����
2025/04/24
 132
132��״�ع������ɸ�������˷ḻ�������˶�ģʽ���������������˵Ļ�����Ӧ��������ǰ�������������Ҫͨ�����ַ�ʽ��ʵ����̬�ı䣺һ�Dz��ö���Ȼ�е�ṹ��ȷ�ع��������������ܲ����Ƴɡ���߱��κ����������ı�ն��������������о���Ա���ԣ���С����ߴ���������ʵ���临�ӱ��������ľ���ս��������������С�߶ȣ���<5cm���£�����ͬʱʵ����������״�仯�빹��������Ҳ���Դ��ͬԴ�ҽ���ı������������ƣ�������Լ�˶�ģʽ���������ͻ���������չ��
���գ��廪��ѧ���캽��ѧԺ�����Ե��Ӽ������Ҽ��ص�ʵ���ң������أ���һ�۽��ڿ�������ò�����ṹЭͬ��ƵIJ��ԣ������һ�־���������״�仯�������������ı�Ĥ�ε�����Ӧ����������Ƹ�����������б��μ�������������������ȣ�����������������С�ijߴ��Լ������������νǶȡ��ڴ˻����ϣ������������˾��и��ӱ���ģʽ�ı�Ĥ�����Ϳ��嵥��������������һ�ס����ľ��ʽ����Ʒ������������Ʊ����и�����״�ع����������������硰���ν�ա��ȣ���ͼ1����
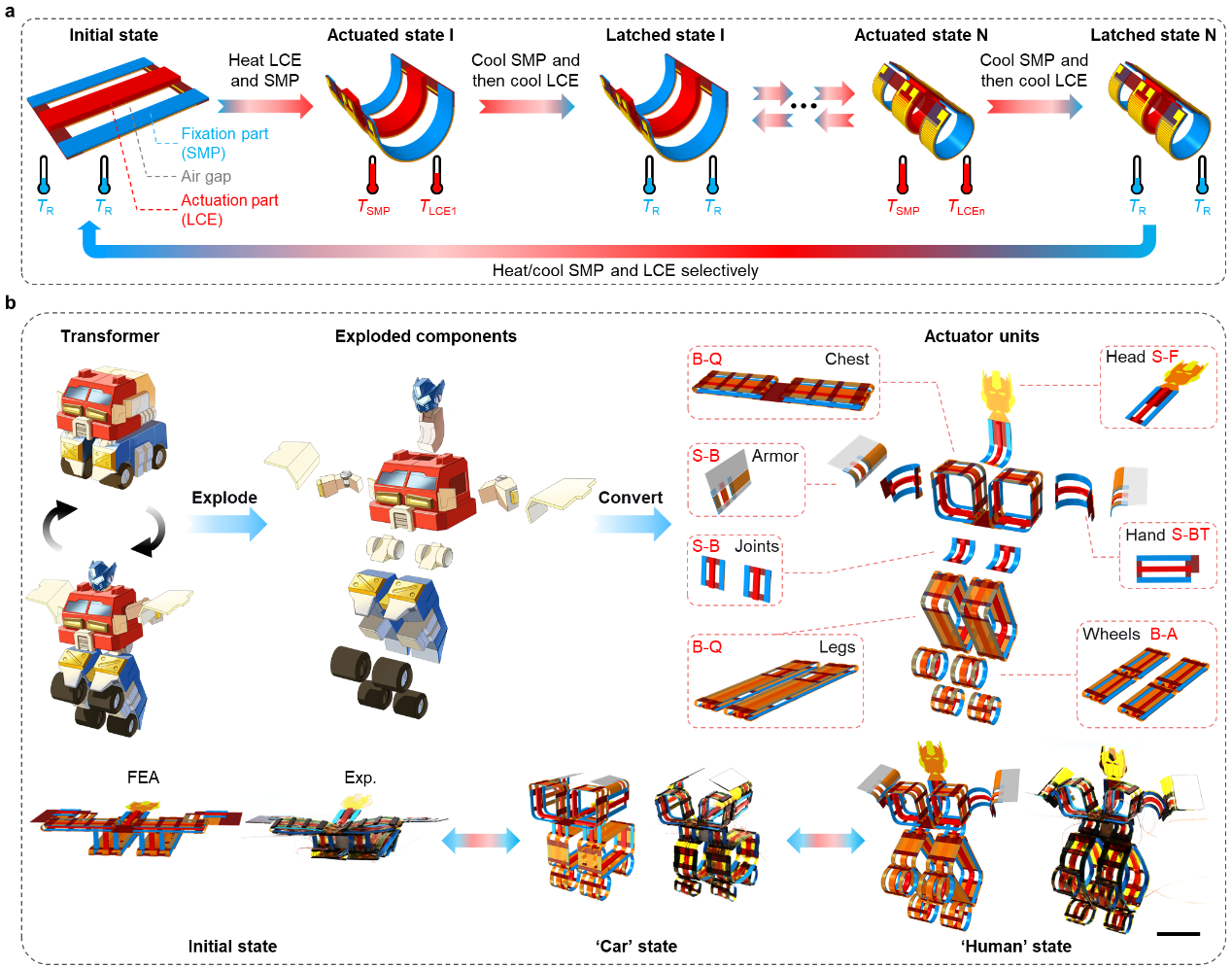
ͼ1.�����������κ�����������С�߶�����������a��Ϊ�������ı��κ�����ʾ��ͼ����b��Ϊ���ڡ����ľ����Ʋ��Եġ����ν�ա����������������ߣ�10mm��
���������߱�����ı��κ����������Լ���ǿ�ij������ԣ�����Ϊ���ع�����������Լ��ɴ�����������ȹ���Ԫ�����������������ӵĻ�����ϵͳ��ͼ2�������ڴˣ�����������Ʊ��˾��и��ӱ����ع���������ά��ʾ���������ڶ��ֹ��ͣ��硰�ܳ������ɳ����͡������������л��Ķ������ʽ�����ˣ��Լ���������С�������������½�����ܻ����ˣ��峤9cm������25g��������˶��ٶ�Ϊÿ��18.2����������
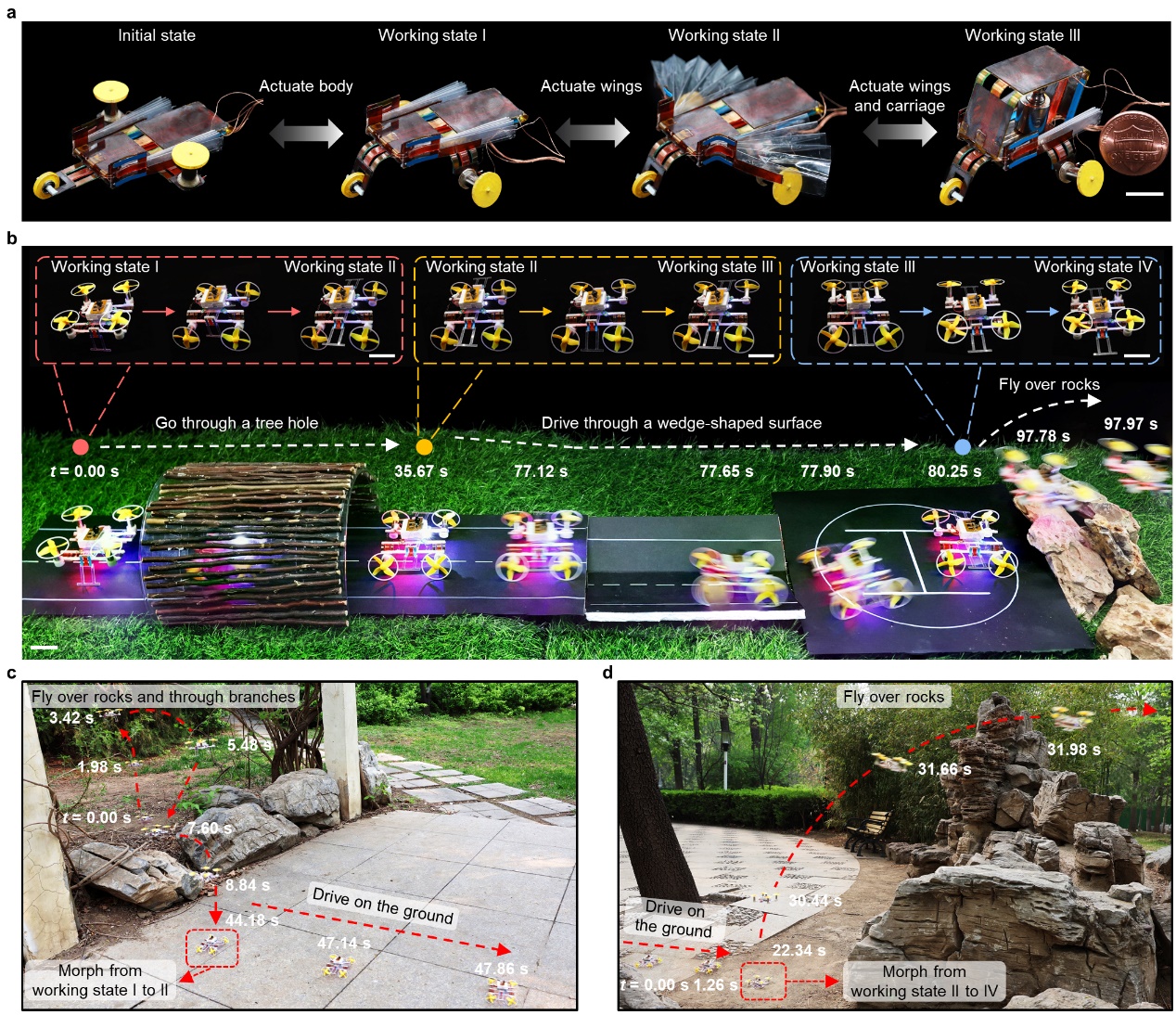
ͼ2.���ڸ��������Ŀ��ع�ϵͳ����a��Ϊ�������ʽ�����ˣ���b��Ϊ��½�����ܻ����ˣ���c��-��d��Ϊ��½�����ܻ����˵Ļ����˶�����չʾ���������ߣ���a��10mm����b��30mm��
4��18�գ�����о��ɹ��ԡ�����������ά���κ����������Ŀ��ع���������Transforming machines capable of continuous 3D shape morphing and locking��Ϊ�⣬���߷����ڡ���Ȼ���������ܡ���Nature Machine Intelligence����
�廪��ѧ���캽��ѧԺ�����Ե��Ӽ������Ҽ��ص�ʵ���ң������أ�������һ��Ϊ����ͨѶ���ߣ����캽��ѧԺ2020����ʿ��������Ϊ���ĵ�һ���ߡ��������������廪��ѧ���캽��ѧԺ2021����ʿ����Ц�С�2024����ʿ��갴��桢2023����ʿ�������ۡ�2022����ʿ����������2018����ʿ�����������캽��ѧԺ��ʿ�������ء�ФԽ�����IJ������IJ������䣬�����ظ��о�Ա���ͺ㣬�Լ��廪��ѧ��е����ϵ�������Ի�濡��������պ����ѧ�����������������պ����ѧ��ʿ���ﲩة�����ڡ��о��õ�������Ȼ��ѧ����ί����ѧ̽�������廪��ѧ��ǿ�о�Ժ�ȵ�������
文章来源�廪��ѧ,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。







-
2025年智能光子学与应用技术国际学 06-10

-
2025年8月优质学术会议推荐 589

-
2025年第十二届能源与环境研究国际 400
-
2025年机械工程,新能源与电气技术 559
-
2025年计算机科学、图像分析与信号 553
-
2025年材料化学与燃料电池技术国际 493
-
第七届精神病学国际大会(CP 202 08-01
-
第七届老龄化与老年医学国际学术会议( 08-01
-
第十四届心理学与健康国际学术研讨会( 08-01
-
第七届测绘与地理信息国际研讨会(CS 08-01
-
第七届大气与海洋科学国际研讨会(SA 08-01
-
第十一届地质灾害研究与防治国际学术会 08-01
-
第十六届地质和地球物理学国际会议(I 08-01
-
第七届细胞科学与再生医学国际研讨会( 08-01
-
第七届合成生物学与生物医学国际研讨会 08-01
























-
2025最新JCR分区及影响因子1939
-
好学术:科研网址导航|学术头条分468
-
《时代技术》投稿全攻略:一位审稿499
-
2025年国际期刊预警名单发布!600
-
2025年中科院期刊分区表重磅发3957
-
中科院已正式发布2024年预警期861
-
2025年度国家自然科学基金项目727
-
中国科协《重要学术会议目录(202733
-
2024年国家自然科学基金项目评1138
-
2024年JCR影响因子正式发布1214
-
吉林大学校长张希:学术会议中的提1391
-
SCI论文插图全攻略:从规范解析08-01
-
国际学术会议参加经验是怎么样的呢08-01
-
掠夺性会议是怎么进行判断的呢?—08-01
-
SCI论文投稿费怎么交?202408-01
-
ϵͳ����רҵίԱ�� 21015

-
��������� 1938
-
�ڰ˽��������Ϣ���̹��ʻ��� 21426
-
�й�ҽҩ����Э�� 1939
-
������������λ�������˾ 23074
-
���ؽ�������� 18111
-
������ҵ��ѧ 17947
-
CSADC2017 23061
-
�ٰ�̩���ʻ��飨����������˾ 20890
-
���ϴ�ѧ����ҽԺ 20928
-
�人־���Ļ���������˾ 8265
-
BABEB 8251
-
�������Ļ���չ���� 1992
-
�й�ˮ�繤�̹��ʼ��Ź�˾���Ͽ��� 22938
-
�й��л�ҽѧ�� 21081
-
������̩������Ϣ�Ƽ�����˾ 1897
-
cnct2016 22905
-
���ʹ�ѧ��������Э�� 2025
-
������˼���� 20971
-
�人�ʢѧ����������˾ 22997



