










浙江大学控制科学与工程学院及浙江大学在微型智能空中机器人集群领域取得进展
2024/04/23
 494
494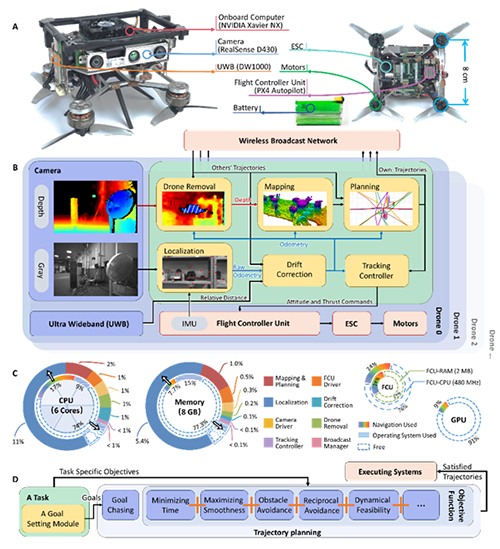 |
图 微型空中机器人集群软硬件架构图
在国家自然科学基金项目(批准号:62075224、62001454)等资助下,浙江大学控制科学与工程学院及浙江大学湖州研究院高飞副研究员、许超教授团队在空中机器人集群领域取得进展。研究成果以“全自主微型飞行机器人集群(Swarm of Micro Flying Robots in the Wild)”为题,于2022年5月5日以封面文章形式在线发表于《科学·机器人》(Science Robotics)期刊上。论文链接:https://www.science.org/doi/10.1126/scirobotics.abm5954。
空中机器人集群从结构化人为环境走向不确定性的野外环境是公认难题,面临三大挑战:算力受限、感知受限、通讯受限。为解决这一难题。研究团队从鸟群飞行中获得灵感,通过解耦目标函数计算中的时空参数,实现了优化变量与轨迹刻画中间变量间的线性复杂度映射,建立了高效的时空优化技术,实现了微型空中机器人集群的通行安全性、动力学可行性、时间最优性以及轨迹平滑性等特性。因此,即使在极为受限的复杂环境中,微型空中机器人集群也可在几毫秒内获得高质量轨迹,极大地提高了系统执行任务的效率和可扩展性。
该研究成果中的微型空中机器人集群不依赖外部定位和计算设施,在仅靠机载摄像头、机载计算芯片资源和传感器的情况下,突破了在野外复杂树林环境下的感知、定位及航迹生成、多智能体通讯等多项核心技术。空中机器人集群通过相互之间的无线通信,实现了轨迹共享、互相避障、协同飞行、多机目标追踪等多项任务挑战。机器人仅为手掌大小,重量小于一听可乐。实物实验中群体规模为10架,仿真中群体规模超50架。飞行器在狭窄空间避障飞行速度2.5米/秒,空旷空间达到10米/秒,滞空超过10分钟,可在复杂环境中自主到达指定位置以及返回(图)。
该研究工作实现了在超低空、强密集、无规则的自然环境中的集群自主飞行,其技术在空中机器人集群的智能性、灵巧性、协同性、鲁棒性等多个方面处于领域领先水平。
文章来源国家自然科学基金委员会,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。







-
2025年智能光子学与应用技术国际学 06-10

-
2025年8月优质学术会议推荐 589

-
2025年第十二届能源与环境研究国际 400
-
2025年机械工程,新能源与电气技术 559
-
2025年计算机科学、图像分析与信号 553
-
2025年材料化学与燃料电池技术国际 493
-
第七届精神病学国际大会(CP 202 08-01
-
第七届老龄化与老年医学国际学术会议( 08-01
-
第十四届心理学与健康国际学术研讨会( 08-01
-
第七届测绘与地理信息国际研讨会(CS 08-01
-
第七届大气与海洋科学国际研讨会(SA 08-01
-
第十一届地质灾害研究与防治国际学术会 08-01
-
第十六届地质和地球物理学国际会议(I 08-01
-
第七届细胞科学与再生医学国际研讨会( 08-01
-
第七届合成生物学与生物医学国际研讨会 08-01
























-
2025最新JCR分区及影响因子1939
-
好学术:科研网址导航|学术头条分468
-
《时代技术》投稿全攻略:一位审稿499
-
2025年国际期刊预警名单发布!600
-
2025年中科院期刊分区表重磅发3957
-
中科院已正式发布2024年预警期861
-
2025年度国家自然科学基金项目727
-
中国科协《重要学术会议目录(202733
-
2024年国家自然科学基金项目评1138
-
2024年JCR影响因子正式发布1214
-
吉林大学校长张希:学术会议中的提1391
-
SCI论文插图全攻略:从规范解析08-01
-
国际学术会议参加经验是怎么样的呢08-01
-
掠夺性会议是怎么进行判断的呢?—08-01
-
SCI论文投稿费怎么交?202408-01
-
IAASE 8113

-
南京邮电大学 2274
-
上海亚化工程咨询有限公司 17940
-
fdsa 24016
-
中国矿业大学 23981
-
青岛大学医学院附属医院超声科 20957
-
武汉mst主办方 18001
-
北京华夏中医药发展基金会 20997
-
武汉cebm主办方 17901
-
武汉中会会议服务有限公司 22999
-
中国生态学学会专业委 17977
-
WQWREW 8113
-
浙江省转化医学学会 8050
-
多格公关顾问 18327
-
中国环境科学学会 21075
-
国防科学技术大学 22956
-
北京东方华月文化传媒中心 18026
-
中华中医药行业科技交流中心 2011
-
武汉科严文化发展有限公司 22948
-
AOCS中国分会 24223



