










清华大学深圳国际研究生院弥胜利团队构建可重编程磁控柔性驱动器
2024/03/21
 390
390磁控柔性驱动器通常由具备磁响应变形能力的柔性复合材料制备获得,在外加磁场的驱动、控制、引导下,可实现非接触式的连续形变、灵活运动、输运货物等功能。磁场驱动凭借其中低频磁场安全性高、可穿透人体组织而不发生明显衰减、通过电信号可实现精准控制等优势,近年来在生物医疗领域展现了广阔的应用前景,也逐渐成为了学科交叉和前沿探索的研究热点。然而,传统的磁控柔性驱动器制备后其磁分布也随之确定,目前缺乏具备可重编程能力、能够高效集成其他功能模块的磁控柔性驱动器。
近日,清华大学深圳国际研究生院弥胜利教授团队报道了一种像素组装式的磁控柔性驱动器的制备工艺,可应用于低成本、可回收、可重编程的磁控驱动器的构建,实现定制化结构变形与仿生运动(抓取、游泳、蠕动等),并集成微流控功能模块可用于开关阀控制、曲率调节、动态芯片结构与液体药物输送机器人等功能。
研究中,团队利用PDMS-NdFeB混合物所制备的像素点与硅胶薄膜之间基于伦敦色散力的可逆粘附作用,通过旋涂、打孔、充磁的方法建立了磁性像素点的基本单元库,根据预期变形设计结构的磁分布,进而基于粘贴组装的简易方式构建具备重编程能力的磁驱动柔性驱动器(图1)。团队构建了多样化功能的磁驱动柔性驱动器,实现了折纸、剪纸、图案化变形,以及六爪抓取、树叶飘动、章鱼游泳、蠕虫蠕动等仿生运动。团队将微流控功能模块集成到硅胶基底层,应用于微流控芯片的开关阀控制、芯片曲率调节、流体混合、动态微流控芯片结构的构建,并开发了一款液态药物递送的磁驱动爬行机器人,结合毒牙式微针,具备体内定点药物释放的应用潜力(图2)。
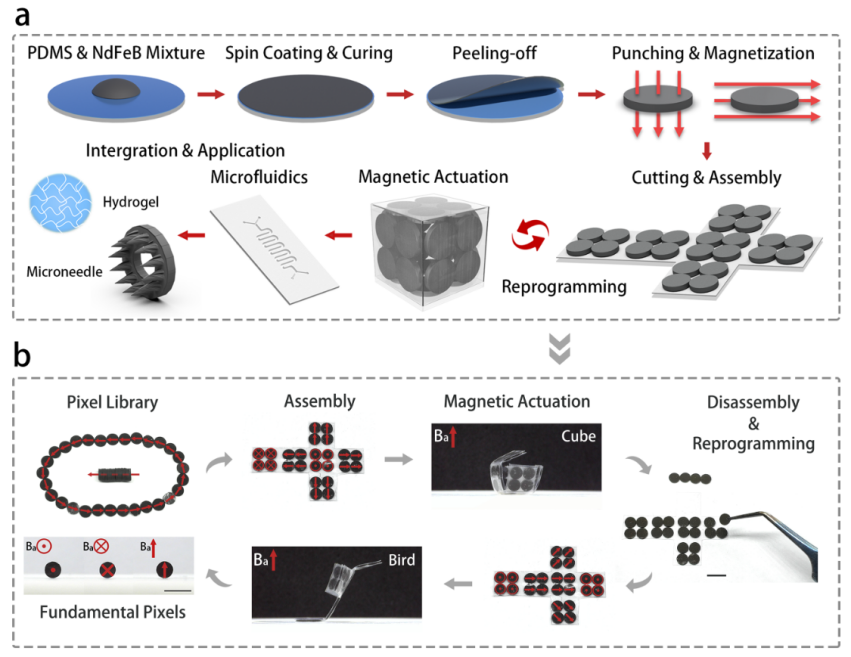
图1.像素化组装磁控柔性驱动器
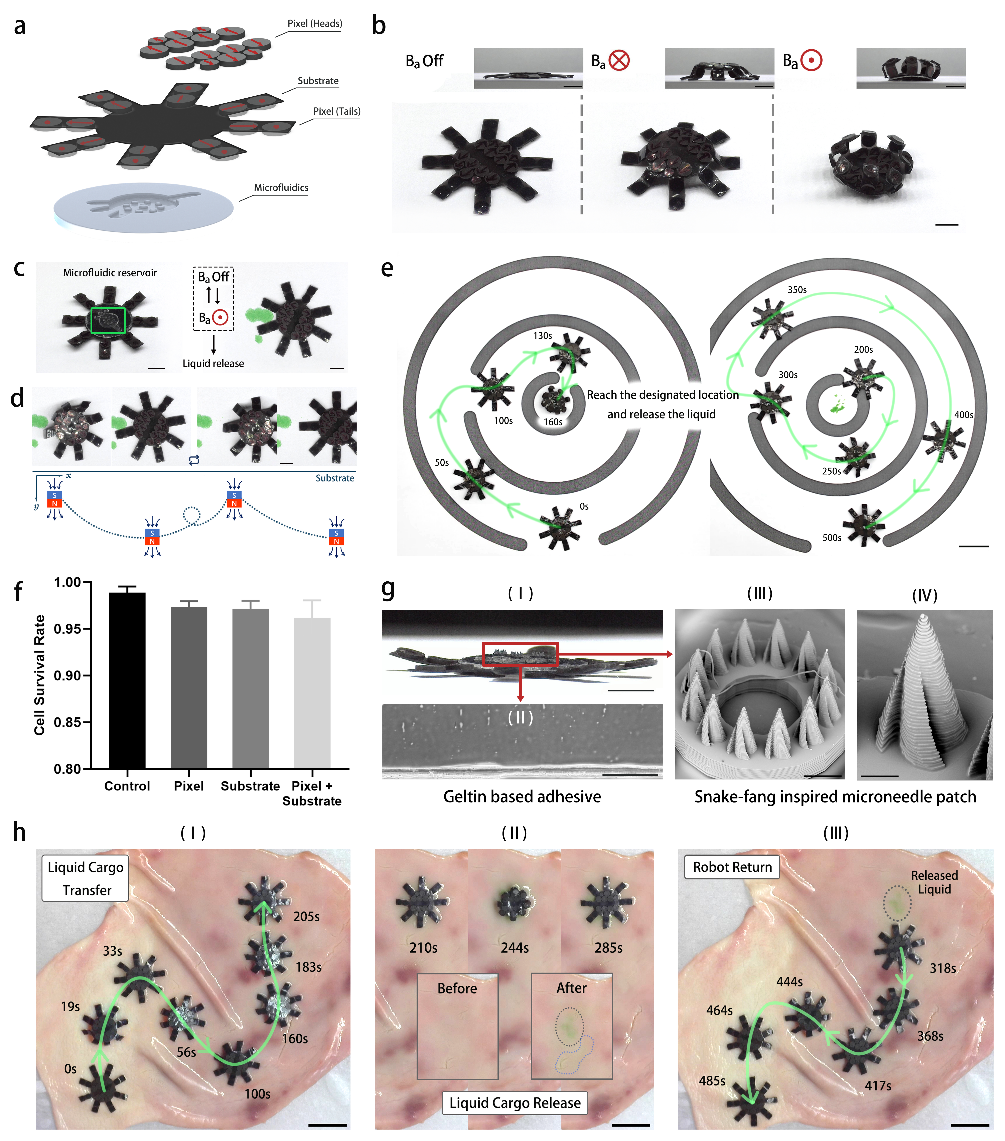
图2.磁驱动液态药物递送机器人
相关研究成果以“基于像素化组装的可重编程可集成微流控功能模块的磁控柔性驱动器”(Reprogrammable Magnetic Soft Actuators with Microfluidic Functional Modules via Pixel-Assembly)为题,近日发表于《微尺度》(Small)。
清华大学深圳国际研究生院弥胜利教授为论文通讯作者,清华大学深圳国际研究生院2023级博士生赵笑宇为论文第一作者。研究得到国家自然科学基金委以及深圳市发展和改革委员会战略性新兴产业发展专项资金扶持计划的支持。
文章来源清华大学新闻,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。







-
2025年智能光子学与应用技术国际学 06-10

-
2025年8月优质学术会议推荐 589

-
2025年第十二届能源与环境研究国际 400
-
2025年机械工程,新能源与电气技术 559
-
2025年计算机科学、图像分析与信号 553
-
2025年材料化学与燃料电池技术国际 493
-
第七届精神病学国际大会(CP 202 08-01
-
第七届老龄化与老年医学国际学术会议( 08-01
-
第十四届心理学与健康国际学术研讨会( 08-01
-
第七届测绘与地理信息国际研讨会(CS 08-01
-
第七届大气与海洋科学国际研讨会(SA 08-01
-
第十一届地质灾害研究与防治国际学术会 08-01
-
第十六届地质和地球物理学国际会议(I 08-01
-
第七届细胞科学与再生医学国际研讨会( 08-01
-
第七届合成生物学与生物医学国际研讨会 08-01
























-
2025最新JCR分区及影响因子1939
-
好学术:科研网址导航|学术头条分468
-
《时代技术》投稿全攻略:一位审稿499
-
2025年国际期刊预警名单发布!600
-
2025年中科院期刊分区表重磅发3957
-
中科院已正式发布2024年预警期861
-
2025年度国家自然科学基金项目727
-
中国科协《重要学术会议目录(202733
-
2024年国家自然科学基金项目评1138
-
2024年JCR影响因子正式发布1214
-
吉林大学校长张希:学术会议中的提1391
-
SCI论文插图全攻略:从规范解析08-01
-
国际学术会议参加经验是怎么样的呢08-01
-
掠夺性会议是怎么进行判断的呢?—08-01
-
SCI论文投稿费怎么交?202408-01
-
纳智博研 23907

-
北京特种工程设计研究院 21154
-
深圳市利达旺贸易有限公司 18076
-
中育心理 1990
-
中国知识产权研究会 17929
-
2015生物工程与基因国际学术会 1900
-
重庆大学 18085
-
同译视创会展公司 23111
-
BIT 2293
-
北京艾尚国际展览有限公司 1859
-
北京易智思信息科技有限公司 7936
-
TREEW 24032
-
广州联庄科技有限公司 23992
-
CCF 计算机工程与工艺专委会 8680
-
福州市广电集团 17995
-
ZHL 23103
-
环旅国际控股 23063
-
中华中医药学会 20938
-
北京贝拓会展服务有限公司 18027
-
武汉青博盛学术服务有限公司 23995



