










我国学者在AI助力城市复杂环境北斗精准定位方面取得进展
2025/06/02
 103
103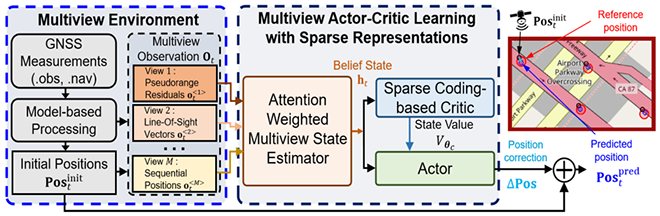
图 稀疏表示驱动的多视角深度强化学习北斗高精度定位
自动驾驶是未来汽车产业的重要战略方向,卫星定位技术则是自动驾驶感知层面的关键环节。然而,在城市高楼林立的复杂环境下,卫星信号常常受到各种障碍物的反射或遮挡,从而引发多路径效应,导致卫星定位发生显著偏移。在2023年中国卫星导航年会上,“城市复杂环境下的卫星定位问题”被列为“卫星导航技术难题”中的首要挑战,也是国内外卫星系统亟待攻克的难关。如何消除多路径干扰,突破城市复杂场景下卫星定位精度瓶颈,是推动我国自动驾驶技术发展的迫切需求。
在国家自然科学基金项目(批准号:62320106008、62273106)资助下,广东工业大学粤港澳联合实验室主任谢胜利教授和副主任李珍妮教授研究团队,在面向城市复杂环境的北斗高精定位方面取得重要进展。针对城市复杂环境下卫星多径信号识别难、卫星定位发生严重偏移等问题,该研究团队依托粤港澳联合实验室,与香港科技大学研究团队开展联合攻关,创新性地研发了基于空域注意力机制的多径信号识别新方法,克服了已有学习模型在动态变化环境下泛化性能差、识别精度低的难题,实现了城市复杂多径环境下多径信号的准确识别及剔除。相关研究成果相较于2021年由香港理工大学团队完成的国际最具代表性研究,其识别精度提高了5%左右。在此基础上,该团队研发了与动态环境实时交互的稀疏表示驱动的多视角深度强化学习北斗高精度定位新技术,有效地解决了观测噪声动态变化干扰造成的定位精度受限问题,实现了城市复杂多径环境下分米级北斗高精定位。相关研究成果相较于美国斯坦福大学团队2022年首次提出的利用深度学习进行卫星定位修正的研究,精度提高了8%左右。
系列研究成果于2023年和2024年发表在导航及测绘领域国际顶级期刊《全球定位系统解决方案》(GPS Solutions)、《IEEE航空航天与电子系统汇刊》(TAES)、《IEEE仪器与测量汇刊》(TIM)和美国导航学会ION GNSS+ 2023导航领域顶级会议上。在与北斗芯片企业深度产学研合作的基础上,该团队正着力于将研究成果部署应用于北斗导航定位模组上进行测试验证。系列研究成果不仅为解决城市复杂环境中的定位挑战提供了新的解决方案,还将为未来自动驾驶安全进入城市应用提供更为可靠的定位技术支持。
文章来源国家自然科学基金委员会,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。







-
2025年智能光子学与应用技术国际学 06-10

-
2025年8月优质学术会议推荐 589

-
2025年第十二届能源与环境研究国际 400
-
2025年机械工程,新能源与电气技术 559
-
2025年计算机科学、图像分析与信号 553
-
2025年材料化学与燃料电池技术国际 493
-
第七届精神病学国际大会(CP 202 08-01
-
第七届老龄化与老年医学国际学术会议( 08-01
-
第十四届心理学与健康国际学术研讨会( 08-01
-
第七届测绘与地理信息国际研讨会(CS 08-01
-
第七届大气与海洋科学国际研讨会(SA 08-01
-
第十一届地质灾害研究与防治国际学术会 08-01
-
第十六届地质和地球物理学国际会议(I 08-01
-
第七届细胞科学与再生医学国际研讨会( 08-01
-
第七届合成生物学与生物医学国际研讨会 08-01
























-
2025最新JCR分区及影响因子1939
-
好学术:科研网址导航|学术头条分468
-
《时代技术》投稿全攻略:一位审稿499
-
2025年国际期刊预警名单发布!600
-
2025年中科院期刊分区表重磅发3957
-
中科院已正式发布2024年预警期861
-
2025年度国家自然科学基金项目727
-
中国科协《重要学术会议目录(202733
-
2024年国家自然科学基金项目评1138
-
2024年JCR影响因子正式发布1214
-
吉林大学校长张希:学术会议中的提1391
-
SCI论文插图全攻略:从规范解析08-01
-
国际学术会议参加经验是怎么样的呢08-01
-
掠夺性会议是怎么进行判断的呢?—08-01
-
SCI论文投稿费怎么交?202408-01
-
北京盛合技术研究院 21217

-
IAASE 7898
-
贵州胜地会议会展公司 20914
-
北京安顺旅行社有限公司 23055
-
npu 23959
-
jieda 21126
-
fdsa 24017
-
武汉赛思会务有限公司 23979
-
南京雅苏达教育咨询有限公司 21083
-
深圳鸿丰大酒店 17980
-
郑州君健教育咨询有限公司 23115
-
北京慈孝文化传播中心 18048
-
中国传媒大学 18032
-
重庆理工大学 20986
-
中科云畅应用技术研究院 23006
-
北京新线国际会展有限公司 8002
-
中国科学院自动化所 24017
-
上海商图信息咨询有限公司 8016
-
北京河之声速记服务中心 18094
-
武汉千学信息咨询有限公司 8047



