










清华大学机械系智能制造与精密加工研究室在基于惯性传感器的人体运动重建上取得新进展
2024/03/27
 647
647动作捕捉技术广泛应用于虚拟现实、人体工程学、医疗康复、影视制作等领域。基于惯性传感器的方法由于对环境要求低、无遮挡问题,在捕捉大规模、复杂多人环境中的人体运动方面具有明显优势,尤其是基于少量惯性测量单元的方法由于其简单性和灵活性而具有更大的研究价值。但是,这类方法往往使用的是深度神经网络,会给设备带来较大的计算负担,提高此类方法的计算效率、减少延迟,并在便携式终端上进行算法部署具有极大挑战性。
针对以上问题,清华大学机械系智能制造与精密加工研究室研究人员提出了一种基于六个惯性传感器的新算法结构FIP(Fast Inertial Poser),为便携式终端的部署带来了一种新的思路。该方法分为两个阶段,关节位置估计和运动学逆解。与之前的方法相比,该方法效率提升的主要原因为:第一,消除了额外的优化设计;第二,基于“最小测量原则”,通过考虑人体形状参数(身高、腿长、单臂长)和性别,使用运动学逆求解器和不同传感器的共享模型来增强神经网络结构的表达能力;第三,去除RNN的双向传播机制。在位置估计阶段,FIP使用三个独立的循环神经网络(RNN)来估计叶节点和其余节点的位置。为了使模型推理过程更接近真实的物理过程,FIP使用传感器共享积分RNN来估计叶节点的位置。此外,对于每个RNN,人体参数信息通过嵌入式编码的方式输入到算法网络中。
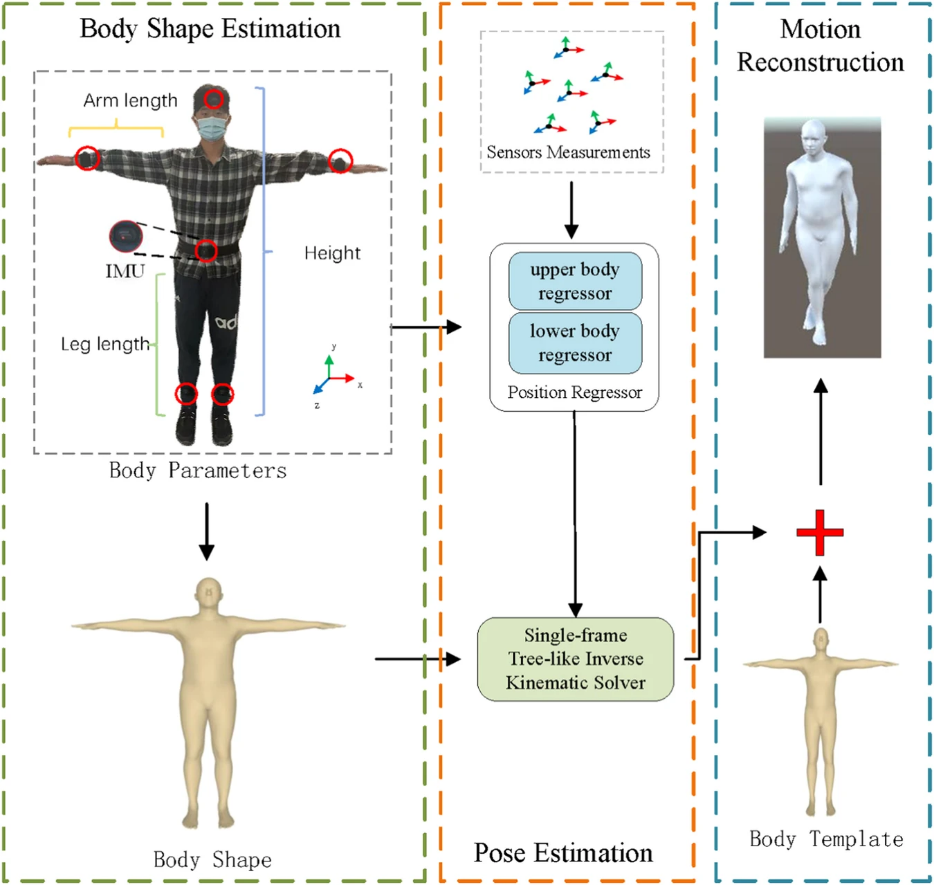
图1.FIP算法示意图
网络具体设计如图2所示,主要使用的子模块为单向循环网络RNN和多层感知机MLP,通过将人体骨架信息输入到不同的模块形成人体形状相关的约束,设计了一种基于人体运动树的特殊逆运动学求解器,帮助模型求解当前帧中关节的旋转。
在基于开源数据集的实验中显示,FIP在保证重建精度的同时降低了动作重建的延迟和解算时间,在PC上的计算时间仅需要2.7毫秒/帧,在Nvidia NX2TX嵌入式开发板上能够以15毫秒延迟和65FPS的帧率稳定运行,为在移动终端的实时人体运动重建提供了一种全新的思路。
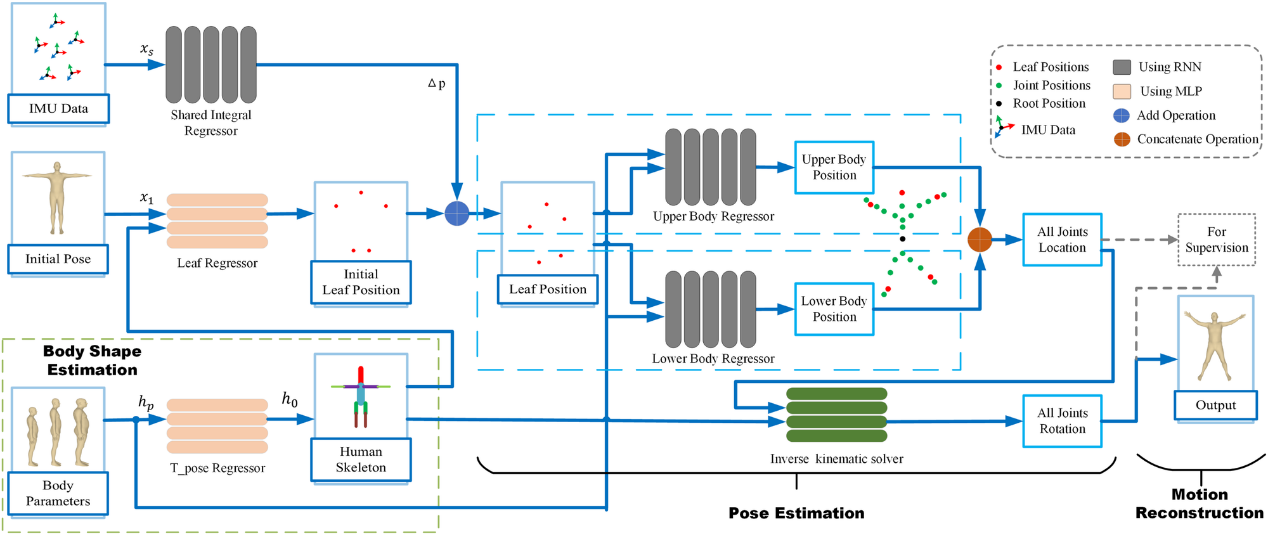
图2. FIP算法Pipeline
相关研究成果以“基于稀疏传感器考虑人体形状快速重建人体运动”(Fast Human Motion reconstruction from sparse inertial measurement units considering the human shape)为题,于3月18日发表于《自然·通讯》(Nature Communications)杂志。
清华大学机械系2023级硕士生肖轩为论文第一作者,机械系教授张建富为论文通讯作者,机械系2023级本科生宫傲,机械系教授冯平法、副教授王健健、助理研究员张翔宇共同参与了研究工作。研究得到清华大学国强研究院项目的支持。
文章来源清华大学新闻,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。







-
2025年智能光子学与应用技术国际学 06-10

-
2025年8月优质学术会议推荐 589

-
2025年第十二届能源与环境研究国际 400
-
2025年机械工程,新能源与电气技术 559
-
2025年计算机科学、图像分析与信号 553
-
2025年材料化学与燃料电池技术国际 493
-
第七届精神病学国际大会(CP 202 08-01
-
第七届老龄化与老年医学国际学术会议( 08-01
-
第十四届心理学与健康国际学术研讨会( 08-01
-
第七届测绘与地理信息国际研讨会(CS 08-01
-
第七届大气与海洋科学国际研讨会(SA 08-01
-
第十一届地质灾害研究与防治国际学术会 08-01
-
第十六届地质和地球物理学国际会议(I 08-01
-
第七届细胞科学与再生医学国际研讨会( 08-01
-
第七届合成生物学与生物医学国际研讨会 08-01
























-
2025最新JCR分区及影响因子1939
-
好学术:科研网址导航|学术头条分468
-
《时代技术》投稿全攻略:一位审稿499
-
2025年国际期刊预警名单发布!600
-
2025年中科院期刊分区表重磅发3957
-
中科院已正式发布2024年预警期861
-
2025年度国家自然科学基金项目727
-
中国科协《重要学术会议目录(202733
-
2024年国家自然科学基金项目评1138
-
2024年JCR影响因子正式发布1214
-
吉林大学校长张希:学术会议中的提1391
-
SCI论文插图全攻略:从规范解析08-01
-
国际学术会议参加经验是怎么样的呢08-01
-
掠夺性会议是怎么进行判断的呢?—08-01
-
SCI论文投稿费怎么交?202408-01
-
东南亚研究 22990

-
北京北发电子商务股份有限公司 18027
-
中国科学院沈阳自动化研究所 17961
-
ICERP2017组委会 20892
-
北京鸿腾瑞达广告有限公司 17945
-
青岛农业大学动物科技学院 18052
-
北京爱迪时尚影像公司 17909
-
北京中工大厦 1937
-
上海市新材料协会 21114
-
ZL 22897
-
福建志联会展有限公司 8031
-
医学会议在线 21401
-
电子科技大学 2269
-
GERSGRE 24098
-
云南大学 18072
-
西南石油大学 8125
-
HKSME 23940
-
广州国龙会议策划服务有限公司 24025
-
北京华进展览展示有限公司 21043
-
湖南长沙市碧桂园凤凰酒店(原威尼 22948



