












我国学者在空中机器人飞行控制方面取得进展
2025/06/03
 305
305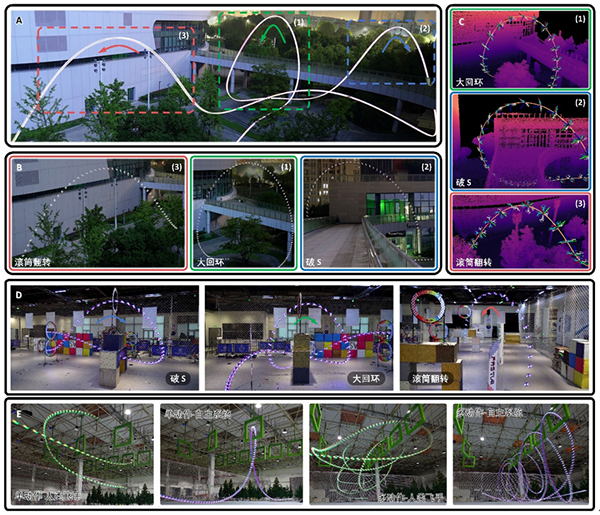
图 不同场景下的自主特技飞行
在国家自然科学基金项目(批准号:62322314、62088101)等资助下,浙江大学控制科学与工程学院高飞副教授团队,在空中机器人的特技动作生成与飞行控制方面取得重要进展。研究成果以“解锁四旋翼的特技飞行潜能:自主特技飞行生成与执行(Unlocking aerobatic potential of quadcopters: Autonomous freestyle flight generation and execution)”为题,于2025年4月17日发表在《科学•机器人》 (Science Robotics)期刊上,并被该期刊官网首页大图介绍。论文链接:https://www.science.org/doi/10.1126/scirobotics.adp9905。
空中机器人在动态密集环境下的大机动飞行是智能无人装备领域的前沿难题,特技飞行作为其极端表现形式,对突破复杂场景下“机动性-安全性-适应性”的三角矛盾具有典型研究意义。当前的技术瓶颈主要体现在两大层面:其一,高难度激进飞行与复杂环境避障存在矛盾,现有算法缺乏对三维空间障碍规避和动力学可行的协同优化,导致激进飞行时极易发生碰撞;其二,针对多样化人机协同需求,缺乏统一的任务建模体系与可扩展动作生成框架,制约了自主系统在复杂场景下的时空自由度与动作泛化能力。
为了释放空中机器人的特技飞行潜能,研究团队研发了面向密集障碍场景的空中机器人特技飞行系统,实现了三项核心技术突破。(1)建立了基于意图基元组合的通用架构:将飞行动作解耦为可自由组合的航点网络和姿态变换单元,支持复杂动作的灵活编排;(2)智能轨迹规划算法:在三维避障约束下同步优化轨迹安全性与动作连贯性,突破了传统方法在复杂环境中的机动限制;(3)特技稳定性控制:通过数学建模揭示了倒飞等极限姿态的偏航敏感现象,规避了失控风险,确保激进机动的可控性。
基于上述创新,该系统既能在大范围非结构化环境中实现220米超长距离连续翻滚、倒转穿梭等高难度特技组合,又能在仅3.5米高的受限密集障碍场中稳定完成隧道倒钻、环形门极限穿越等专业级动作。通过与顶尖人类飞手同台竞技,系统展现出显著优势:在连续6次倒钻狭窄门框任务中实现100%成功率(人类飞手成功率仅12.5%)。本研究发掘了空中机器人在复杂三维空间自主执行专业级特技飞行的潜能,其动作流畅度与任务鲁棒性均超越顶尖人类飞手,将推动空中机器人在灾后搜索、物资投送、高速机动等极端场景中的实际应用。
文章来源国家自然科学基金委员会,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。







-
2025年通信网络与智能系统工程国际 07-24

-
2025年8月优质学术会议推荐 508

-
2025年第十二届能源与环境研究国际 367
-
2025年机械工程,新能源与电气技术 538
-
2025年计算机科学、图像分析与信号 524
-
2025年材料化学与燃料电池技术国际 463
-
2025年第九届电力与能源工程国际会 07-28
-
2025年第七届智能自主系统国际会议 07-28
-
2025年IEEE第八届电子与通信工 07-28
-
2025年第十一届机械与电子工程国际 07-28
-
2025年第四届亚洲电力与电气技术会 07-28
-
2025年第十一届机器人与人工智能国 07-28
-
2025年第12届机械、汽车与材料工 07-28
-
2025年第15届通信与网络安全国际 07-28
-
2025年第14届运输和交通工程国际 07-28
























-
2025最新JCR分区及影响因子1829
-
好学术:科研网址导航|学术头条分452
-
《时代技术》投稿全攻略:一位审稿460
-
2025年国际期刊预警名单发布!571
-
2025年中科院期刊分区表重磅发3898
-
中科院已正式发布2024年预警期839
-
2025年度国家自然科学基金项目709
-
中国科协《重要学术会议目录(202620
-
2024年国家自然科学基金项目评1115
-
2024年JCR影响因子正式发布1189
-
吉林大学校长张希:学术会议中的提1364
-
从选题到发表:5个关键步骤攻克S07-28
-
投了学术会议真的可以不参加吗?学07-28
-
EI会议期刊论文怎么写?资深审稿07-28
-
如何在Scopus发文?从选刊到07-28
-
克里门森互动(北京)顾问有限公司 7919

-
华东理工大学 20982
-
武汉红矮星传媒有限公司 2378
-
南京医格尔信息科技有限公司 21145
-
北京中材企联新材料技术研究中心 20890
-
同昕绿源(北京)生物科技股份有限 17961
-
个体 1939
-
北京天晓互动企划有限公司 17975
-
济南宏达公司 17973
-
上海诗成文化发展有限公司 24130
-
南京世通展览服务有限公司 1874
-
European Allianc 2205
-
南京航空航天大学 20936
-
北京木兰创业贸易发展有限公司 22923
-
中国膜工业协会 21018
-
重庆理工大学 8158
-
湖南大学机械与运载工程学院 21105
-
MHT 8184
-
北京艾尚国际展览有限公司 7971
-
西北大学 7898



