

















南京大学“大脑—小脑”协同:让四足机器人更自然、更敏捷
2026/05/29
 133
133近日,南京大学机器人与自动化学院陈春林教授团队及其合作者发表最新研究成果,该研究面向四足机器人在复杂环境中的敏捷运动问题,提出了一种融合自然行为学习、任务决策控制与仿真到现实迁移的一体化控制框架,使四足机器人能够像动物一样在多种障碍环境中自主切换步态、快速奔跑、跨越障碍,并完成复杂敏捷任务。
让机器人不仅“能走”,还要“会跑、会跳、会切换动作”
四足机器人被认为是未来复杂环境作业的重要载体,可应用于灾害救援、工业巡检、野外探测、危险场景作业等任务。然而,相比真实动物,现有四足机器人虽然已经能够在楼梯、崎岖地形和室外环境中行走,但在面对连续复杂障碍时,仍然难以展现出类似动物的自然性、灵活性和高速敏捷性。
真实犬类在敏捷赛道中可以根据障碍类型快速切换步态:有时小跑,有时疾驰,有时腾跃,有时压低身体穿过障碍。这种能力并不是单一动作的重复,而是多种自然行为在感知、决策和身体控制之间的协同。
本研究的核心问题正是:如何让四足机器人像动物一样,既能感知环境,又能根据任务需要自主切换自然运动行为?
视频1
大脑—小脑式协同:高层决策 + 底层自然行为
为解决这一问题,团队提出了一种集成式控制器,主要由两部分组成:
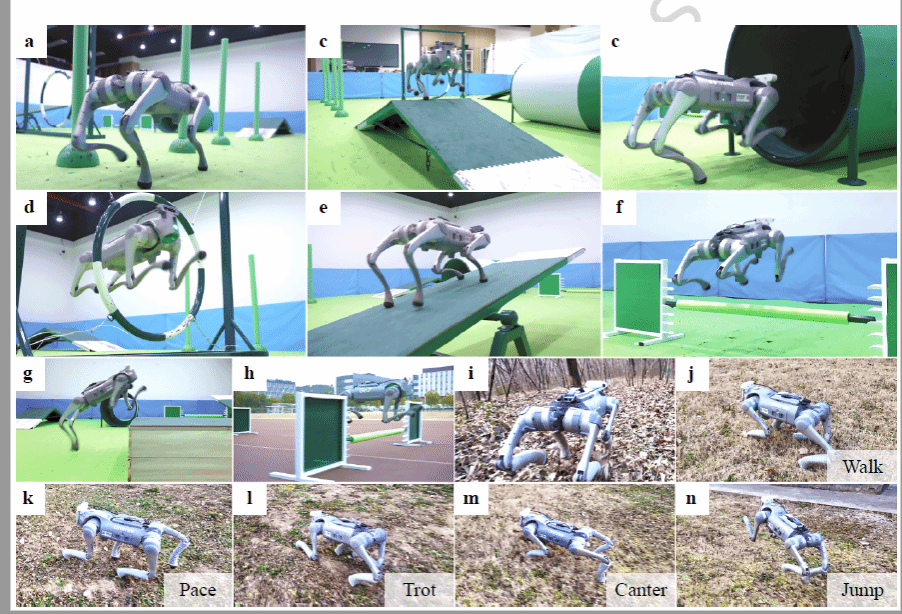
基础行为控制器 BBC:负责学习和生成四足机器人的基本自然运动行为,类似动物神经系统中的底层运动控制模块。该模块从真实犬类运动捕捉数据中学习 walk、pace、trot、canter、jump 等多种行为模式,使机器人具备自然步态和动作切换能力。
视频2
任务特定控制器 TSC:负责根据深度图像感知障碍环境,并向基础行为控制器发送行为模式、速度、高度等指令,类似高层感知与决策模块。它让机器人能够根据不同障碍自主选择合适动作,例如低速转弯时选择 trot,高速前进时选择 canter,需要越障时切换到 jump。
这种设计使机器人不再只是“被动执行固定步态”,而是能够在任务过程中动态组织不同运动行为,实现自然性与敏捷性的统一。
视频3
只依靠简单深度感知,完成复杂敏捷挑战
在实验中,团队构建了一个受犬类敏捷比赛启发的四足机器人敏捷挑战场景。赛道包含六类随机排列的障碍物:A 型坡道、横杆跳跃、绕杆、跷跷板、轮胎跳跃和隧道。障碍物的位置、顺序和角度均随机变化,要求机器人从起点出发,在尽可能短的时间内完成全部障碍并抵达终点。
值得注意的是,机器人只使用一枚 Intel RealSense D435i 深度相机进行感知,不依赖精确全局定位。实验平台为 Unitree Go2 四足机器人。
在 500 个随机生成的环境中,机器人完成完整敏捷挑战的平均速度达到 1.1 m/s,平均完成时间为 24 秒;在高速跨栏任务中,机器人峰值速度达到 3.2 m/s。
这意味着机器人不仅能够“看见障碍”,还能够根据障碍特征实时选择合适的自然行为,并在真实世界中稳定执行。
视频4
三个关键技术创新
1. 从真实犬类运动中学习多样化自然行为
传统强化学习方法往往需要人工设计复杂奖励函数,容易产生“能完成任务但动作不自然”的问题。本研究引入半监督生成对抗模仿学习方法,从真实犬类运动捕捉数据中提取多种自然行为风格。
团队使用少量标注数据引导行为类别学习,同时利用大量未标注数据捕捉连续动作风格变化。这样,机器人不仅能学会 walk、pace、trot、canter、jump 等离散行为,还能通过连续潜变量生成不同风格的运动细节。
简单来说,机器人学到的不只是“跳一下”或“跑起来”,而是一套可组合、可切换、可调节的自然运动能力。
2. 面向复杂任务的视觉决策控制
复杂敏捷赛道中,机器人不仅要会运动,还要知道“什么时候该跑、什么时候该跳、什么时候该转弯”。
为此,团队设计了任务特定控制器,通过特权学习框架训练视觉策略。训练时,教师策略可以访问障碍类型、地形扫描点和路径信息;部署时,学生策略仅依靠深度图像和本体感知信息完成任务。
同时,研究引入 BYOL 自监督表征学习方法,提高深度图像特征在真实噪声环境下的鲁棒性。实验表明,在噪声干扰下,该方法仍能显著提升任务成功率和障碍识别能力。
视频5
3. 用少量真实数据缩小仿真到现实差距
四足机器人训练通常依赖仿真环境,但仿真与真实世界之间存在差距,导致策略部署到真实机器人时性能下降。
团队采用 Evolutionary Adversarial Simulator Identification,简称 EASI,对仿真器参数进行自动优化,使仿真动力学更接近真实机器人。该方法只需约 80 秒真实世界数据,即可在 10 分钟以内完成参数搜索,并显著提升仿真到现实迁移效果。
基于EASI方法,用少量真实机器人数据来优化仿真器参数,使仿真环境更接近真实机器人。从”大脑一小脑一世界模型”的视角看,EASI 可以理解为帮助机器人建立一个更加可信的”内部世界模型”。这对于未来机器人快速部署到不同平台和复杂环境具有重要意义。
为什么这项研究重要?
这项工作并不只是让机器人完成几个漂亮动作,而是向“动物级敏捷机器人”迈出了一步。
过去,很多四足机器人研究更关注单项能力:走楼梯、爬坡、越障、奔跑或跳跃。但真实世界任务往往不是单一动作,而是连续变化的复杂过程。机器人需要在感知环境的同时,持续调整运动行为。
本研究的贡献在于,将自然行为学习、视觉决策控制和仿真到现实迁移结合起来,使机器人具备了更接近动物的运动组织方式:
它能看见环境,理解障碍,选择动作,并用自然的身体行为完成任务。
这为未来四足机器人进入灾害救援、复杂巡检、家庭服务和危险环境作业等场景提供了新的技术路径。
视频6
从“机械运动”走向“自然行为”
长期以来,人们希望机器人能够像动物一样灵活运动。但真正的动物运动并不是简单的轨迹跟踪,而是感知、决策、身体控制与环境反馈之间的连续协调。
本研究表明,通过从真实动物数据中学习多样化行为,并结合面向任务的视觉决策控制,四足机器人可以逐步摆脱“机械式运动”的局限,向更加自然、敏捷和自主的运动能力发展。
未来,随着更丰富的动物运动数据、更强的视觉感知模型以及更高效的真实世界学习方法引入,四足机器人有望在更开放、更动态、更复杂的真实环境中展现出接近甚至超越动物的敏捷能力。
视频7
作者介绍
该工作由南京大学机器人与强化学习控制团队完成。
论文题目为 Learning Diverse Natural Behaviors for Enhancing the Agility of Quadrupedal Robots,发表于 Nature Communications。论文作者包括 傅汇乔、董浩宇、许文涛、周哲浩、邓归洲、唐开强、陈春林及其合作者。其中,唐开强、陈春林为共同通讯作者。
博士研究生傅汇乔为论文第一作者,主要围绕四足机器人自然行为学习、模仿学习与敏捷运动控制开展研究。
唐开强博士,南京大学机器人与自动化学院助理研究员,长期从事强化学习、仿生机器人运动控制、智能机器人决策规划等方向研究,在多足机器人复杂地形运动、强化学习控制与智能机器人系统方面积累了丰富研究基础。
陈春林教授,南京大学机器人与自动化学院教授,IEEE Fellow,研究方向:强化学习、智能控制、多智能体系统与机器人学习等。
论文链接:https://doi.org/10.1038/s41467-026-72475-9
Cite this article as: Fu, H., Dong, H.,Xu, W. et al. Learning diverse natural behaviors for enhancing the agility of quadrupedal robots. Nat Commun (2026). https://doi.org/10.1038/ s41467-026-72475-9
文章来源南京大学,分享只为学术交流,如涉及侵权问题请联系我们,我们将及时修改或删除。





-
2026年第五届机器学习、云计算与智 944

-
2026年第九届可再生能源和电力工程 130
-
2026年第二届计算机视觉与机器学习 1516
-
2026年6月优质国际学术会议推荐 1941
-
2026年人工智能赋能信息与通信系统 207
-
2026资源、化学化工与应用材料国际 3308
-
2026年图像处理与数字创意设计国际 3145
-
2026年机械工程,新能源与电气技术 7616
-
2026年材料科学、低碳技术与动力工 3284
-
第五届全球医疗健康展览会(上海) 07-15

-
2026美术考古、文物保护与修复国际 07-14
-
2026古代史、文献研究与历史地理学 07-14
-
2026中医外科、护理与慢性病管理国 07-14
-
2026工程地质学、施工管理与安全科 07-14
-
2026船舶通信、航海技术与智能控制 07-14
































-
2026 JCR影响因子正式发布712
-
中国科协发布2025年《重要学术1277
-
2026年新锐分区(原中科院期刊7061
-
2025年两院院士增选有效候选人5691
-
好学术:科研网址导航|学术头条分7364
-
2025年国际期刊预警名单发布!7578
-
2025年中科院期刊分区表重磅发26288
-
吉林大学校长张希:学术会议中的提8634
-
研究揭示黄河口近海微生物群落生态07-11
-
研究揭示黑土农田土壤有机碳积累的07-11
-
恒星反馈与多代恒星形成研究获进展07-11
-
近岸复杂水体中颗粒有机碳光学反演07-11
-
研究利用反向喷流揭示3C 84黑07-11
-
科研人员构建人类胚盘样原肠模型07-11
-
南京大学北半球多年冻土区苔原植被07-11
-
新疆光大旅行社 18491

-
云南大学国际关系研究院东南亚研究 18754
-
广尧商务咨询有限公司 24607
-
会展服务有限公司 24515
-
江苏省岩土力学与工程学会 19064
-
武汉格拉文化传播有限公司 23412
-
湖北武汉大学 18539
-
百奥泰集团 2400
-
北京日月辰科技发展集团 24473
-
深圳市中腾建业建设投资有限贵司 8320
-
津安商务(天津)旅游会议有限公司 23534
-
东北电力大学 18576
-
中商联数据委员会 21453
-
BEGWAFW 8368
-
富丽华大酒店 18390
-
HKSME 23457
-
超飞巨英合特会展公司 18492
-
湖南信息科学职业学院 18487
-
同方知网 24808
-
东南大学数学系 18507



